Photometry¶
Measuring light¶

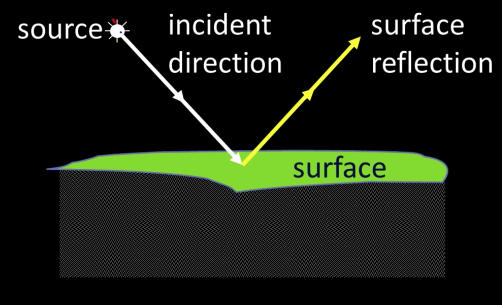
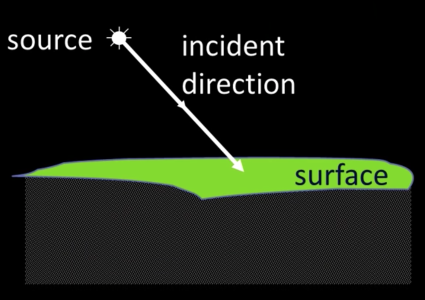
Lights, surface, and shadows¶
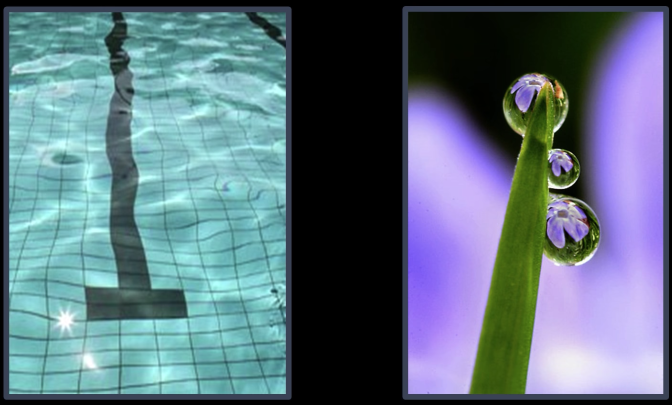
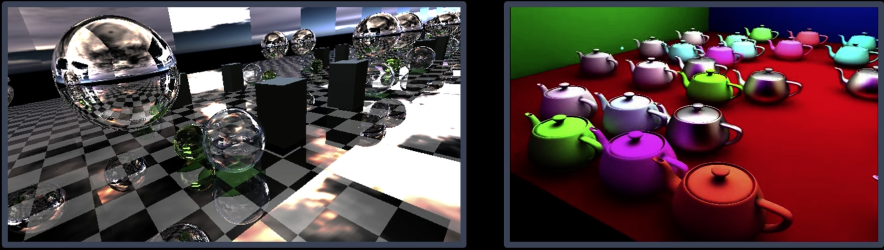
Reflections¶

Refraction¶
Interreflection¶
Scattering¶
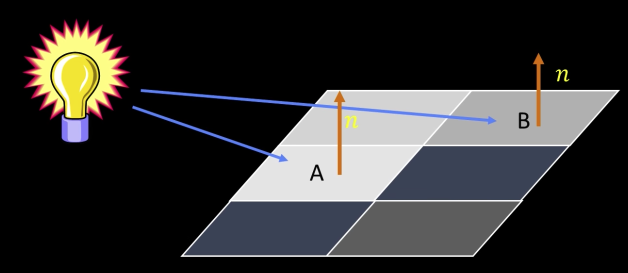
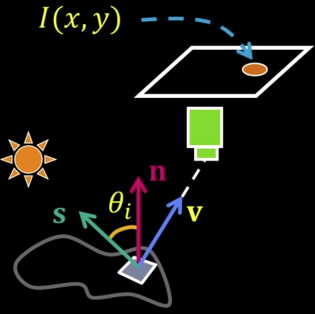
Surface Appearance¶

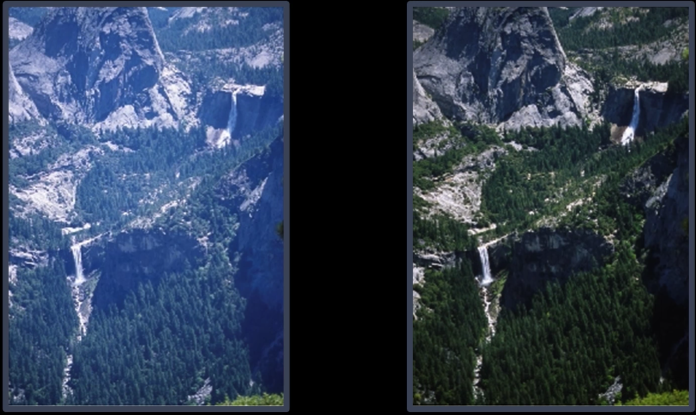
- Image intensity = $f$(normal, surface reflectance, illumination)
- Surface reflection depends on both the viewing and illumination direction
Radiometry Radiance¶
Radiometry Irradiance¶
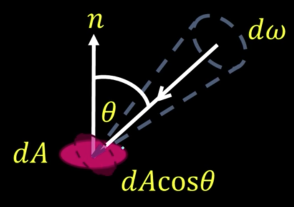
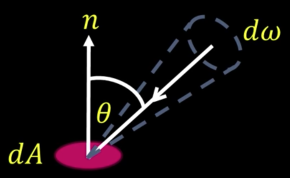
Foreshortening: A simple observation¶
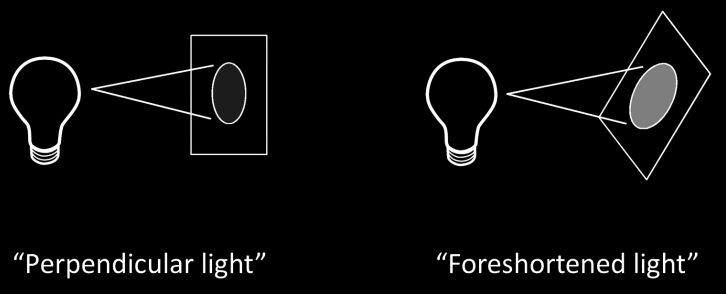
For a surface receiving radiance $L(\theta, \varphi)$coming in from $d\omega$ the corresponding irradiance is
$$E(\theta,\varphi) = L(\theta,\varphi)cos(\theta) d\omega$$
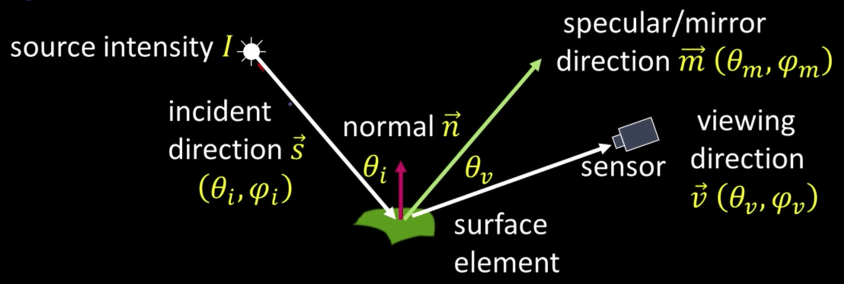
BRDF: Bidirectional Reflectance Distribution Function¶
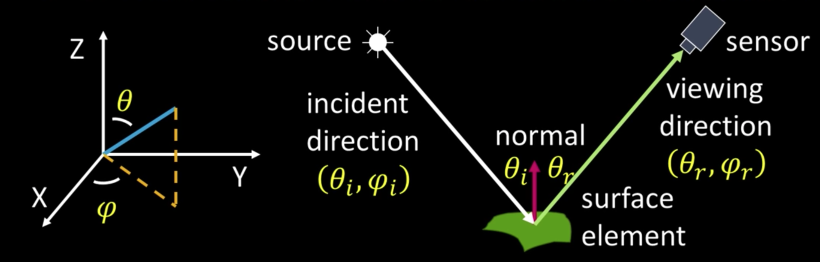
Irradiance: Light per unit area incident on a surface
Radiance: Light from the surface reflected in a given direction, within a given solid angle
$E^{surface}(\theta_i,\varphi_i)$ : Irradiance at surface from direction $(\theta_i,\varphi_i)$
$L^{surface}(\theta_i,\varphi_i)$ : Rradiance from surface in direction $(\theta_r,\varphi_r)$
BRDF: $f(\theta_i,\varphi_i;\theta_r,\varphi_r) = \frac{L^{surface}(\theta_i,\varphi_i)}{E^{surface}(\theta_i,\varphi_i)}$
Important properties of BRDFs¶
- Helmholts Reciprocity:
$f(\theta_i,\varphi_i;\theta_r,\varphi_r) = f(\theta_r,\varphi_r;\theta_i,\varphi_i)$
- Rotational Symmetry (Isotropy):
$f(\theta_i,\varphi_i;\theta_r,\varphi_r) = f(\theta_i,\theta_r;\varphi_i - \varphi_r)$
BRDF's can be incredibly complicated¶

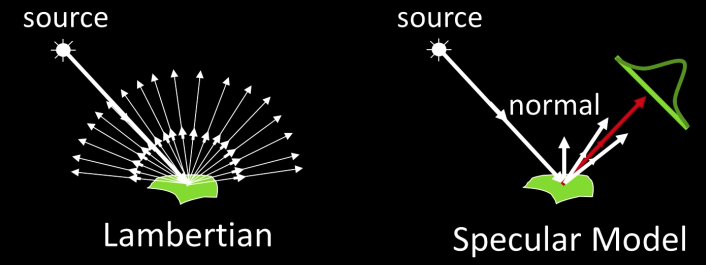
Reflection Models¶
**Body (diffuse) Reflection:** - Diffuce Reflection - Matte Appearance - Non-Homogeneous medium - Clay, paper, etc.



Diffuse Reflection and Lambertian BTDF¶
- Only body reflection, and no specular reflection
- Lamberts law - essentially a patch looks equally bright from every direction


Diffuse Reflection and Lamertian BRDF¶

Surface appears equally bright from all directions! (independent of $\overrightarrow{v})$
Lambertian BRDF is simply a constant - the albedo:
$$\color{blue}{f(\theta_i,\varphi_i;\theta_r,\varphi_r) = \rho_d}$$
- Surface Radiance:
$$\color{blue}{L = \rho_d I cos(\theta_i) = \rho_d I (\overrightarrow{n}\cdot \overrightarrow{s})}$$
Where:
$\color{blue}{I}$: source intensity
Specular Reflection and Mirror BRDF¶
How about a mirror?
Reflection only at mirror angle
All incident light reflected in a single direction (visible when $\overrightarrow{v} = \overrightarrow{m}$)
Mirror BRDF is simple a double-delta function:
$$\color{blue}{f(\theta_i,\varphi_i;\theta_r,\varphi_r) = \rho_s \delta(\theta_i - \theta_v)\delta(\phi_i + \pi - \phi_v)}$$
- Surface Radiance: $$\color{blue}{L = I \rho_s \delta(\theta_i - \theta_v)\delta(\varphi_i + \pi - \varphi_v)}$$
Specular Reflection and Glossy BRDF¶

$$L = I \rho_s (\overrightarrow{m}\cdot \overrightarrow{v})^k$$
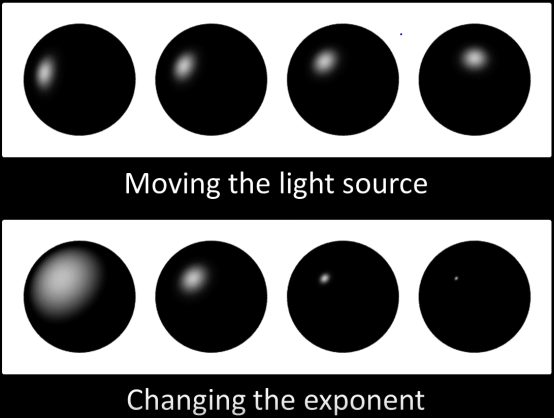
Phong Reflection Model¶
The BRDF of many surfaces can be approximated by:

In [3]:
import numpy as np
import cv2
from matplotlib import pyplot as plt
import PIL
from io import BytesIO
from IPython.display import clear_output, Image as NoteImage, display
def imshow(im,fmt='jpeg'):
#a = np.uint8(np.clip(im, 0, 255))
f = BytesIO()
PIL.Image.fromarray(im).save(f, fmt)
display(NoteImage(data=f.getvalue()))
def imread(filename):
img = cv2.imread(filename)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
return img
def red(im):
return im[:,:,0]
def green(im):
return im[:,:,1]
def blue(im):
return im[:,:,2]
def gray(im):
return cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
def square(img,center,size,color=(0,255,0)):
y,x = center
leftUpCorner = (x-size,y-size)
rightDownCorner = (x+size,y+size)
cv2.rectangle(img,leftUpCorner,rightDownCorner,color,3)
def normalize_img(s):
start = 0
end = 255
width = end - start
res = (s - s.min())/(s.max() - s.min()) * width + start
return res.astype(np.uint8)
def line(img,x):
cv2.line(img,(0,x),(img.shape[1],x),(255,0,0),3)
def mse(imageA, imageB):
# the 'Mean Squared Error' between the two images is the
# sum of the squared difference between the two images;
# NOTE: the two images must have the same dimension
err = np.sum((imageA.astype("float") - imageB.astype("float")) ** 2)
err /= float(imageA.shape[0] * imageA.shape[1])
# return the MSE, the lower the error, the more "similar"
# the two images are
return err
def random_color():
color = list(np.random.choice(range(256), size=3))
return (int(color[0]),int(color[1]),int(color[2]))
In [24]:
## Code from https://gist.github.com/rossant/6046463
import numpy as np
import matplotlib.pyplot as plt
from PIL import Image
w = 400
h = 300
def normalize(x):
x /= np.linalg.norm(x)
return x
def intersect_plane(O, D, P, N):
# Return the distance from O to the intersection of the ray (O, D) with the
# plane (P, N), or +inf if there is no intersection.
# O and P are 3D points, D and N (normal) are normalized vectors.
denom = np.dot(D, N)
if np.abs(denom) < 1e-6:
return np.inf
d = np.dot(P - O, N) / denom
if d < 0:
return np.inf
return d
def intersect_sphere(O, D, S, R):
# Return the distance from O to the intersection of the ray (O, D) with the
# sphere (S, R), or +inf if there is no intersection.
# O and S are 3D points, D (direction) is a normalized vector, R is a scalar.
a = np.dot(D, D)
OS = O - S
b = 2 * np.dot(D, OS)
c = np.dot(OS, OS) - R * R
disc = b * b - 4 * a * c
if disc > 0:
distSqrt = np.sqrt(disc)
q = (-b - distSqrt) / 2.0 if b < 0 else (-b + distSqrt) / 2.0
t0 = q / a
t1 = c / q
t0, t1 = min(t0, t1), max(t0, t1)
if t1 >= 0:
return t1 if t0 < 0 else t0
return np.inf
def intersect(O, D, obj):
if obj['type'] == 'plane':
return intersect_plane(O, D, obj['position'], obj['normal'])
elif obj['type'] == 'sphere':
return intersect_sphere(O, D, obj['position'], obj['radius'])
def get_normal(obj, M):
# Find normal.
if obj['type'] == 'sphere':
N = normalize(M - obj['position'])
elif obj['type'] == 'plane':
N = obj['normal']
return N
def get_color(obj, M):
color = obj['color']
if not hasattr(color, '__len__'):
color = color(M)
return color
def trace_ray(rayO, rayD):
# Find first point of intersection with the scene.
t = np.inf
for i, obj in enumerate(scene):
t_obj = intersect(rayO, rayD, obj)
if t_obj < t:
t, obj_idx = t_obj, i
# Return None if the ray does not intersect any object.
if t == np.inf:
return
# Find the object.
obj = scene[obj_idx]
# Find the point of intersection on the object.
M = rayO + rayD * t
# Find properties of the object.
N = get_normal(obj, M)
color = get_color(obj, M)
toL = normalize(L - M)
toO = normalize(O - M)
# Shadow: find if the point is shadowed or not.
l = [intersect(M + N * .0001, toL, obj_sh)
for k, obj_sh in enumerate(scene) if k != obj_idx]
if l and min(l) < np.inf:
return
# Start computing the color.
col_ray = ambient
# Lambert shading (diffuse).
col_ray += obj.get('diffuse_c', diffuse_c) * max(np.dot(N, toL), 0) * color
# Blinn-Phong shading (specular).
col_ray += obj.get('specular_c', specular_c) * max(np.dot(N, normalize(toL + toO)), 0) ** specular_k * color_light
return obj, M, N, col_ray
def add_sphere(position, radius, color):
return dict(type='sphere', position=np.array(position),
radius=np.array(radius), color=np.array(color), reflection=.5)
def add_plane(position, normal):
return dict(type='plane', position=np.array(position),
normal=np.array(normal),
color=lambda M: (color_plane0
if (int(M[0] * 2) % 2) == (int(M[2] * 2) % 2) else color_plane1),
diffuse_c=.75, specular_c=.5, reflection=.25)
In [43]:
# List of objects.
color_plane0 = 1. * np.ones(3)
color_plane1 = 0. * np.ones(3)
scene = [add_sphere([.75, .1, 1.], .6, [0., 0., 1.]),
add_sphere([-.75, .1, 2.25], .6, [.5, .223, .5]),
add_sphere([-2.75, .1, 3.5], .6, [1., .572, .184]),
add_plane([0., -.5, 0.], [0., 1., 0.]),
]
# Light position and color.
L = np.array([5., 5., -10.])
color_light = np.ones(3)
# Default light and material parameters.
ambient = .05
diffuse_c = 1.
specular_c = 1.
specular_k = 50
depth_max = 5 # Maximum number of light reflections.
col = np.zeros(3) # Current color.
O = np.array([0., 0.35, -1.]) # Camera.
Q = np.array([0., 0., 0.]) # Camera pointing to.
img = np.zeros((h, w, 3))
r = float(w) / h
# Screen coordinates: x0, y0, x1, y1.
S = (-1., -1. / r + .25, 1., 1. / r + .25)
# Loop through all pixels.
for i, x in enumerate(np.linspace(S[0], S[2], w)):
if i % 50 == 0:
print (i / float(w) * 100, "%")
for j, y in enumerate(np.linspace(S[1], S[3], h)):
col[:] = 0
Q[:2] = (x, y)
D = normalize(Q - O)
depth = 0
rayO, rayD = O, D
reflection = 1.
# Loop through initial and secondary rays.
while depth < depth_max:
traced = trace_ray(rayO, rayD)
if not traced:
break
obj, M, N, col_ray = traced
# Reflection: create a new ray.
rayO, rayD = M + N * .0001, normalize(rayD - 2 * np.dot(rayD, N) * N)
depth += 1
col += reflection * col_ray
reflection *= obj.get('reflection', 1.)
img[h - j - 1, i, :] = np.clip(col, 0, 1)
In [50]:
img = normalize_img(img)
imshow(img)

In [220]:
messi400 = imread("imgs/messi400.jpg")
In [33]:
messi400_s = cv2.resize(messi400, dsize=(400, 300), interpolation=cv2.INTER_CUBIC)
In [35]:
# from L2
def resize(image,size):
return cv.resize(image, size)
def multiply(image,factor):
return np.uint8(np.clip(factor*image, 0, 255))
def blend(img1,img2,factor):
return multiply(img1,factor)+multiply(img2,1-factor)
In [53]:
imshow(blend(gray(messi400_s),img[:,:,0],0.4))

👑Against Eibar on past Sunday, Lionel Messi becomes first player in any of Europe's top 5 leagues to score 400 goals.👑¶
- Image intensity = $f$(normal, surface reflectance, illumination)
- Surface reflection depends on both the viewing and illumination direction

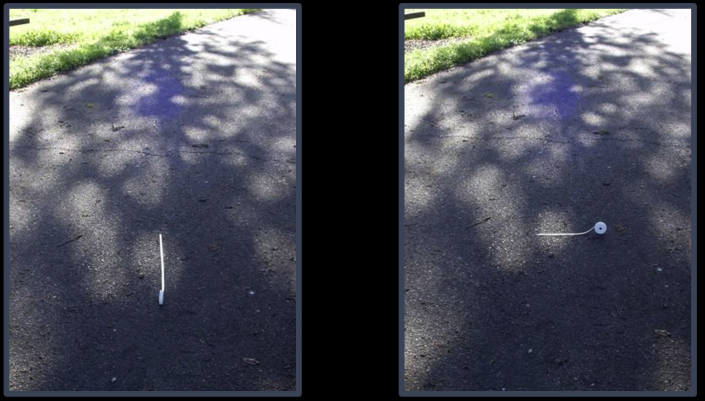
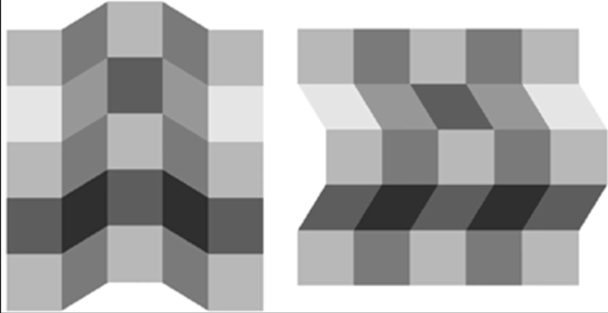
Fig.11 What do you see??
Lightness Assumptions¶
Simple scene right?¶


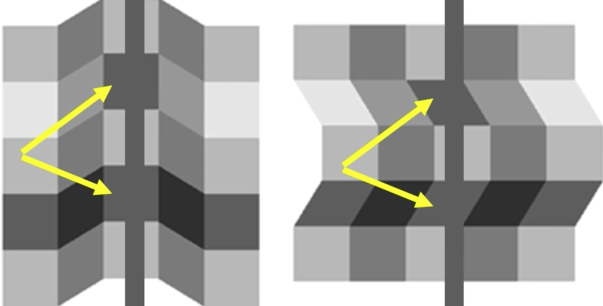
What is going on??!!
The Brain is Compensating for the "shadow"
Lightness perception is influeneced by 3D cues¶
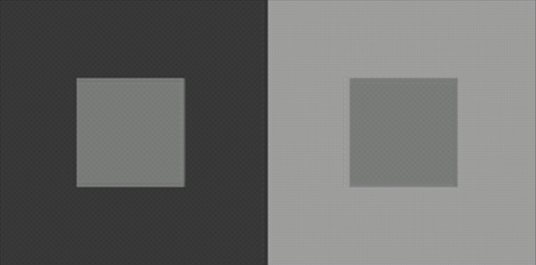
Simultaneous contrast effect¶
Quiz Reflectence vs Irradiance Quiz¶
$$\color{blue}{L(x,y) = R(x,y) * E(x,y)}$$
Where:
$\color{blue}{R(x,y)}$: surface reflectance (color, texture)
$\color{blue}{E(x,y)}$: incoming light (brintness, angle)
Which vary faster or more frequently with changes in location and which one varies slower or less frequently?
surface reflectance changes more
Ambiguity of Lighting and Reflectance¶
Planar, Lambertian material:
$$L = I * \rho * cos(\theta)$$
where:
$\rho$: reflectance (aka albedo)
$\theta$: angle between light and $n$
$I$: illuminance (strenght of light)
If we combine $\color{blue}{\theta}$ and $\color{blue}{I}$ at a point $\color{blue}{E(x,y)}$ , and have a reflectance function $\color{blue}{R(x,y)}$ then:
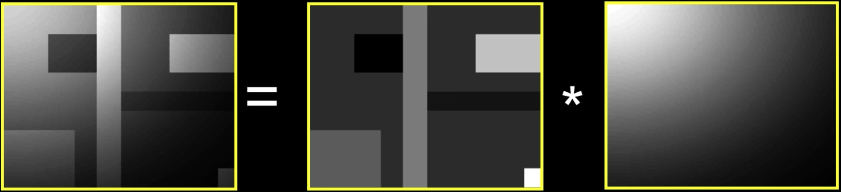
$$L(x,y) = R(x,y) * E(x,y)$$
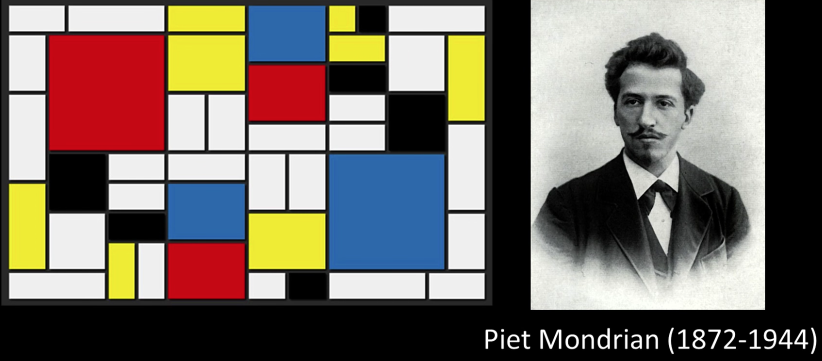
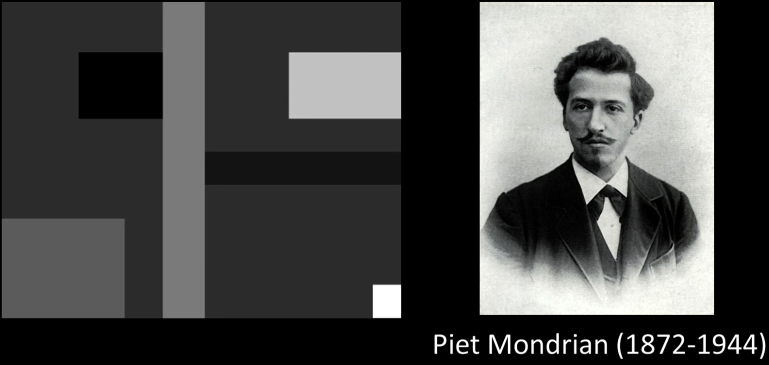
Lighning in the Mondrian World¶
Illumination: slowly varying¶
$$L(x,y) = R(x,y) * E(x,y)$$
Formally, we assume that illuminance, $\color{blue}{E}$, is low frequency

Reflectance, $\color{blue}{R}$, is constant over patches separated by edges.

How can we recover the albedo?
We will do it in code
In [59]:
def display_triple(imgs,titles):
plt.gray()
plt.figure(figsize=(20,20))
plt.subplot(131)
ax = plt.gca()
ax.xaxis.set_major_locator(plt.NullLocator())
ax.yaxis.set_major_locator(plt.NullLocator())
plt.imshow(imgs[0])
plt.title(titles[0], size=20)
if len(imgs)> 1:
plt.subplot(132)
plt.imshow(imgs[1])
plt.title(titles[1], size=20)
ax = plt.gca()
ax.xaxis.set_major_locator(plt.NullLocator())
ax.yaxis.set_major_locator(plt.NullLocator())
if len(imgs)> 2:
plt.subplot(133)
plt.imshow(imgs[2])
plt.title(titles[2], size=20)
ax = plt.gca()
ax.xaxis.set_major_locator(plt.NullLocator())
ax.yaxis.set_major_locator(plt.NullLocator())
plt.show()
In [60]:
e = gray(imread("imgs/ch5BL1LigMonWor.png"))
r = gray(imread("imgs/ch5BL1LigMonWor2.png"))
l = blend(e,r,0.5)
display_triple([e,r,l],["Illuminance","Reflectance","Lightning"])

In [82]:
sr = 255-r[50]
sl = 255-l[50]
se = 255-e[50]
fig,axs = plt.subplots(ncols=3)
axs[0].plot(sr)
axs[1].plot(sl)
axs[2].plot(se)
Out[82]:

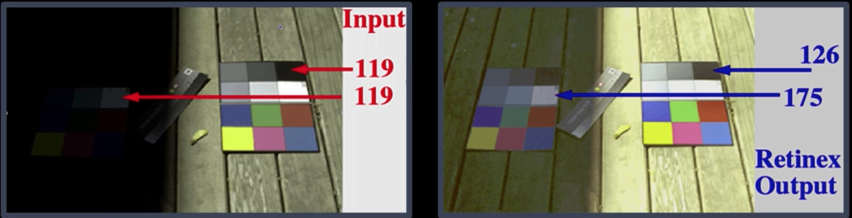
Given the right chart, how to recover the left??
Retnix¶

- Edwind Land (1909-1991) - inventor of Polaroid Land camera
- Early demonstrations that humans perceive different lightness (or color) for same objective brightness
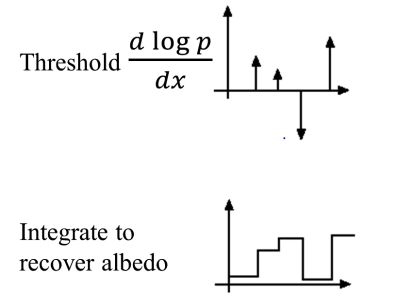
Land's Retnix Theory¶
- Goal: remove slow variations from the image
- Many approaches to this. One is
$$L(x,y) = R(x,y) * E(x,y)$$ $$log(L(x,y)) = log(R(x,y)) + log(E(x,y))$$
- Hi-pass filter (say with derivative)
- Threshold to remove small low-frequencies
- Then invert process; take integral, exponentiate

In [83]:
from numpy import diff
dx = 1
se_log = np.log(se)
sr_log = np.log(sr)
sl_log = sr_log + se_log
fig,axs = plt.subplots(ncols=3,nrows=2)
fig.set_size_inches((20,15))
axs[0,0].plot(sr_log)
axs[0,1].plot(se_log)
axs[0,2].plot(sl_log)
axs[1,0].plot(diff(sr_log)/dx)
axs[1,1].plot(diff(se_log)/dx)
axs[1,2].plot(diff(sl_log)/dx)
axs[1,1].set_title("d log(L)/dx")
Out[83]:

In [95]:
from scipy import integrate
dlogp = diff(sl_log)/dx
dlogp[abs(dlogp)<0.1] = 0
x = np.arange(dlogp.size)
y_int = integrate.cumtrapz(dlogp, x, initial=0)
fig,axs = plt.subplots(ncols=2)
fig.set_size_inches((20,15))
axs[0].plot(sr)
axs[1].plot(y_int)
axs[0].set_title("Actual")
axs[1].set_title("Recovered")
Out[95]:

In [ ]:
## Anyone is welcome to show a color example in code
Sharp edges¶

Human Color and Lightness Constancey¶
- Color constancy:</font> determine hue and saturation under different colors of lightning
- Lightness constancy: </font> gray-level reflectance under differing intensity of lighting
More in the lecture

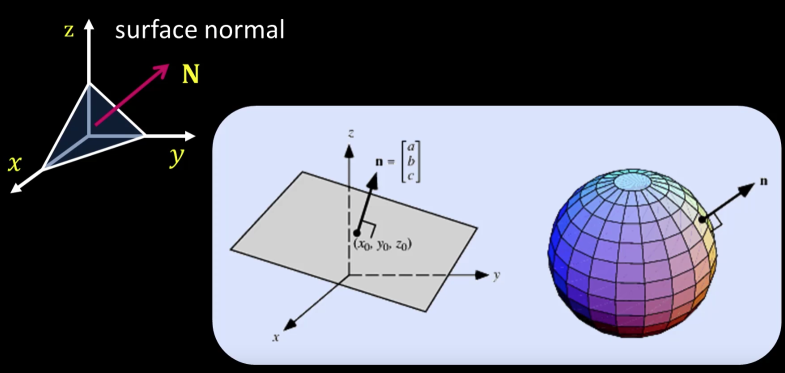
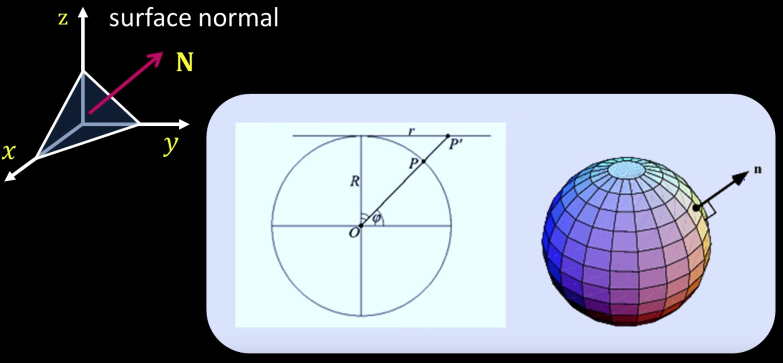
Surface Normals Math¶
- Let's assume we have a surface $z(x,y)$
- We can define the following

Suppose we have a point on the surface. We can define two tangents:
If we want a unit normal, we take
In [99]:
import numpy as np
def sample_spherical(npoints, ndim=3):
vec = np.random.randn(ndim, npoints)
vec /= np.linalg.norm(vec, axis=0)
return vec
In [156]:
from matplotlib import pyplot as plt
from mpl_toolkits.mplot3d import axes3d
from matplotlib import cm
phi = np.linspace(0, np.pi, 40)
theta = np.linspace(0, 2 * np.pi, 40)
x = np.outer(np.sin(theta), np.cos(phi))*2
y = np.outer(np.sin(theta), np.sin(phi))*2
z = np.outer(np.cos(theta), np.ones_like(phi))*2
xi, yi, zi = sample_spherical(500)*2
fig, ax = plt.subplots(1, 1, subplot_kw={'projection':'3d', 'aspect':'equal'})
fig.set_size_inches((20,15))
ax.plot_wireframe(x, y, z,color='k', rstride=1, cstride=1)
ax.scatter(xi, yi, zi, s=100, c='r', zorder=10)
Out[156]:

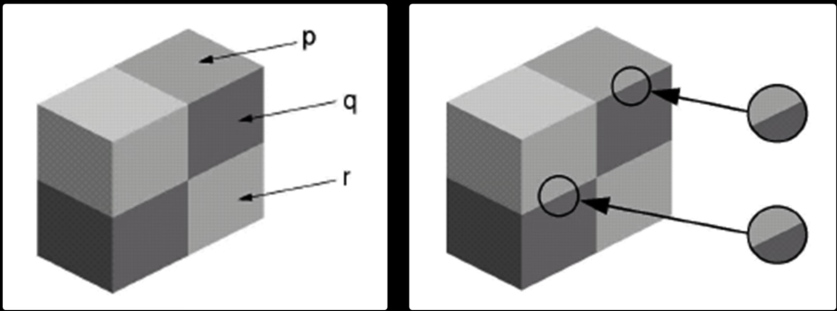
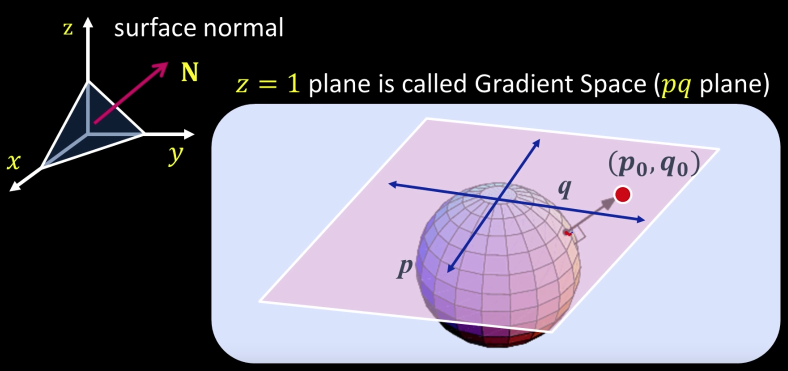
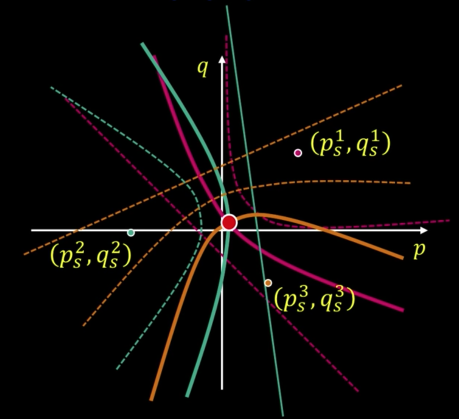
Gradient Space of Source and Normal¶

Unit normal vector:
$n = \frac{N}{|N|} = \frac{(p,q,1)}{\sqrt{p^2+q^2+1}}$
Unit source vector:
$s = \frac{S}{|S|} = \frac{(p_S,q_S,1)}{\sqrt{p_S^2+q_S^2+1}}$
$$cos\theta_i = n\cdot s = \frac{(pp_s+qq_s+1)}{\sqrt{p^2+q^2+1}\sqrt{p_S^2+q_S^2+1}}$$
In [162]:
%matplotlib inline
fig, ax = plt.subplots(1, 1, subplot_kw={'projection':'3d', 'aspect':'equal'})
fig.set_size_inches((20,15))
ax.plot_wireframe(x, y, z,color='k', rstride=1, cstride=1)
from mpl_toolkits.mplot3d.art3d import Poly3DCollection
xt = [0,1,1]
yt = [0,0,1]
zt = [0,1,0]
p1,p2,p3 = list(zip(xt, yt,zt))
p1,p2,p3 = np.array(p1),np.array(p2),np.array(p3)
u = p2-p1
v = p3-p1
tv = [u[1]*v[2] - u[2]*v[1],
u[2]*v[0] - u[0]*v[2],u[0]*v[1] - u[1]*v[0]]
## Triangle
verts = [[x1,x2,x3]]
ax.add_collection3d(Poly3DCollection(verts))
## Light
lx=-2;ly=-2;lz=2
ax.scatter([lx],[ly],[lz],s=500, c='y', marker='o')
## Center
ax.scatter([0],[0],[0],s=500, c='r', marker='o')
## Triangle Normal
ax.scatter(tv[0],tv[1],tv[2],s=500, c='b', marker='o')
ax.plot([0,tv[0]],[0,tv[1]],[0,tv[2]],linewidth=7.0)
##Light Normal
lv = np.array([lx,ly,1])/np.sqrt(lx**2+ly**2+1)
ax.scatter(lv[0],lv[1],lv[2],s=500, c='y', marker='o')
ax.plot([0,lv[0]],[0,lv[1]],[0,lv[2]],linewidth=7.0,c='y')
print("The cos(theta): ",np.dot(tv,lv))

Lambertian Case¶
Reflectance map¶
Relates image brightness $I(x,y)$ to surface orientation $(p,q)$ for given source direction and surface reflectance
Lambertian case¶
Term:
- K: source brightness
- $\rho$: surface albedo (reflectance)
Image brighness:
- $\color{blue}{I = \rho \cdot k \cdot cos\theta_i = \rho \cdot k(n\cdot s)}$
let $\color{blue}{\rho \cdot k = 1}$ then $\color{blue}{I = cos\theta_i = n\cdot s}$
$$\color{blue}{I = cos\theta_i = n \cdot s = \frac{pp_S + qq_S + 1}{\sqrt{p^2 + q^2 + 1}\sqrt{p_S^2+q_S^2+1}} =R(p,q)}$$
$R(p,q)$: Reflectance Map (Lambertian)

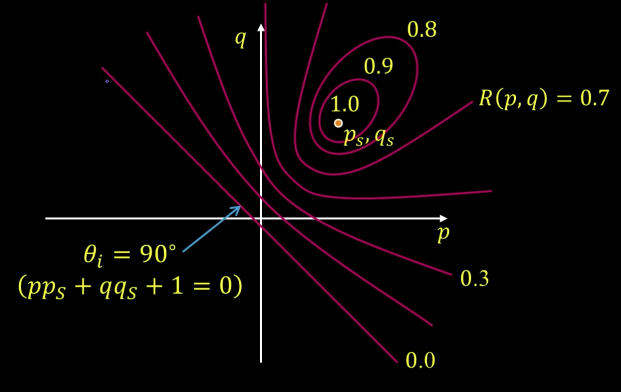
In [219]:
import matplotlib.pyplot as plt
import numpy as np
delta = 0.1
xrange = np.arange(-10, 5, delta)
yrange = np.arange(-10, 5, delta)
xs,ys = 1,1
X, Y = np.meshgrid(xrange,yrange)
XS, YS = np.ones(X.shape)*xs,np.ones(X.shape)*ys
# F is one side of the equation, G is the other
F = (X*XS + Y*YS + 1)/(np.sqrt(X**2 + Y**2 + 1)*np.sqrt(XS**2+YS**2+1))
print(Y.shape)
plt.xlim((-1,6))
plt.ylim((-1,6))
for i in np.arange(0,1,0.1):
plt.contour(X,Y,F, [i])
# plt.contour(X,Y,F, [0.8])
# plt.contour(X,Y,F, [0.7])
# plt.contour(X,Y,F, [0.6])
plt.scatter(xs,ys)
plt.show()

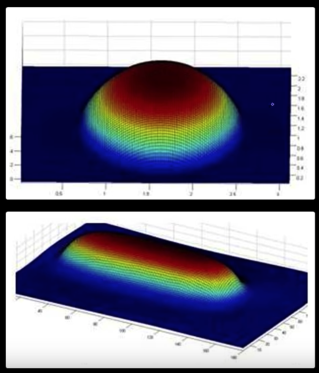
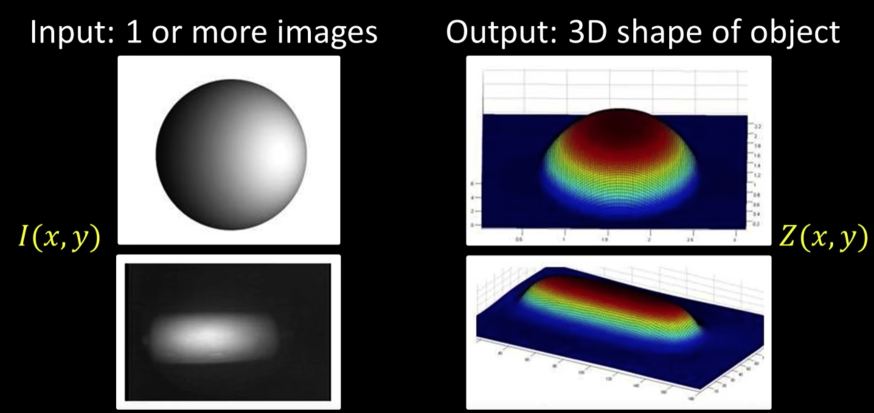
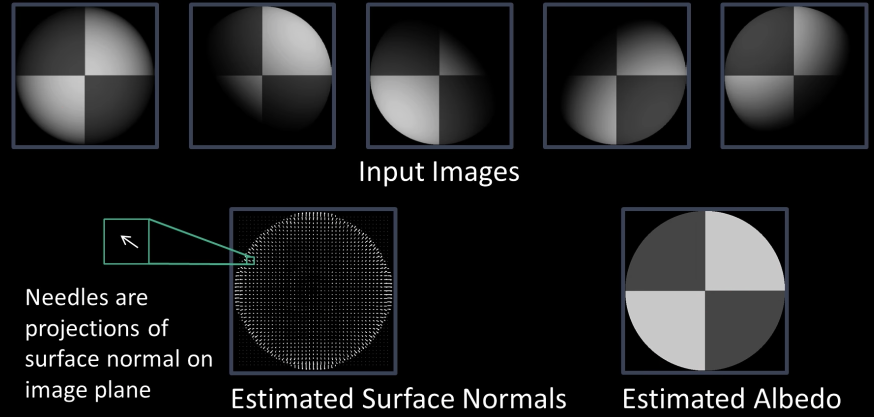
Photometric Stereo¶
Synthetic results¶
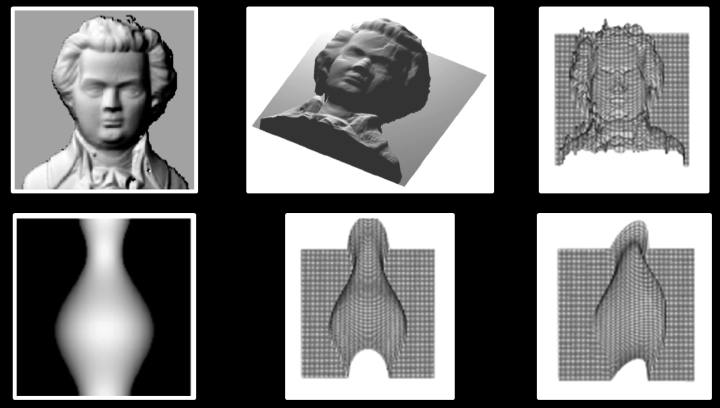
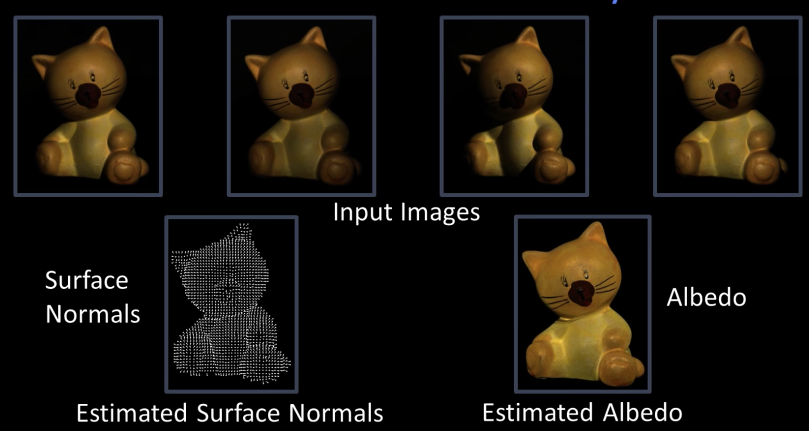
Shape from Shading: "Real" Results¶

- These single image methods work poorly in practice
- Why? The assumptions are quite restrictive
Need more information:
- Add more constraints: Shape-from-shading
- Take more images: Photometric stereo
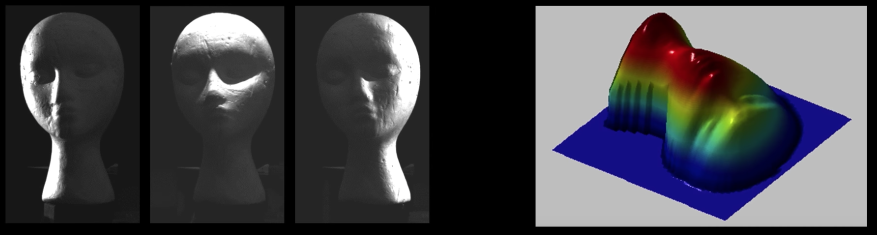
Photometric stereo¶
Input: Several images
- Same object
- Different lightings
- Sampe pose
output
- 3D shape of object
- Albedo at $(x,y)$
Solving the Equations¶
Photmetric stereo¶
Image brightness:
$$\color{blue}{I = \rho \cdot k \cdot cos\theta_i = \rho n \cdot s}$$
Where $(k = 1)$
$$\color{blue}{I_1 = \rho n \cdot s_1}$$ $$\color{blue}{I_2 = \rho n \cdot s_2}$$ $$\color{blue}{I_3 = \rho n \cdot s_3}$$
Write this as a matrix equation:
$$\color{blue}{\begin{bmatrix}I_1\\ I_2\\ I_2\end{bmatrix} = \rho \begin{bmatrix}S_1^T\\ S_2^T\\ S_2^T\end{bmatrix}n}$$

$\color{blue}{I}$ and $\color{blue}{S}$ are known
$$\color{blue}{\rho n = \tilde{n}}$$
$$\color{blue}{\tilde{n} = S^{-1} I}$$
$$\color{blue}{\rho = |\tilde{n}|}$$
$$\color{blue}{n = \frac{\tilde{n}}{|\tilde{n}|}=\frac{\tilde{n}}{\rho}}$$
Adding more light sources¶
Get better results by using more ($M$) lights:
$$\color{blue}{\begin{bmatrix}I_1\\ . \\. \\. \\ I_M\end{bmatrix} = \begin{bmatrix}S_1^T\\ . \\. \\. \\ S_M^T\end{bmatrix}\rho n}$$
Least squares solutions
$$\color{blue}{I = S\tilde{n}}$$
In [472]:
import matplotlib.pyplot as plt
import numpy as np
def contour(xs,ys,ax):
delta = 0.1
xrange = np.arange(-10, 5, delta)
yrange = np.arange(-10, 5, delta)
X, Y = np.meshgrid(xrange,yrange)
XS, YS = np.ones(X.shape)*xs,np.ones(X.shape)*ys
# F is one side of the equation, G is the other
F = (X*XS + Y*YS + 1)/(np.sqrt(X**2 + Y**2 + 1)*np.sqrt(XS**2+YS**2+1))
print(Y.shape)
plt.xlim((-6,6))
plt.ylim((-6,6))
for i in np.arange(0,1,0.1):
ax.contour(X,Y,F, [i])
ax.scatter(xs,ys)
ax = plt.gca()
contour(1,1,ax)
contour(-1,-1,ax)
contour(-1,1,ax)
plt.show()



Messi On Contours¶
In [473]:
## from https://stackoverflow.com/questions/41624616/plot-implicit-equations-in-python-3
import matplotlib.pyplot as plt
import numpy as np
messi400 = imread("imgs/messi400.jpg")
delta = 0.1
xrange = np.arange(-10, 10, delta)
yrange = np.arange(-10, 10, delta)
X, Y = np.meshgrid(xrange,yrange)
messi_heart = np.ones(messi400.shape).astype(np.int)*255
# F is one side of the equation, G is the other
F = X**2
G = 1 - (1.08*Y/1.1 - np.sqrt(np.abs(X)))**2
print(F.shape,G.shape)
plt.gca().imshow(np.flipud(gray(messi400[90:290,160:360])),origin='lower')
Z = F-G
Z[X<-10] = None
Z[X>10] = None
x = plt.contour(Z, [50],colors="red",
levels=np.arange(50, 220, 20))
plt.show()
