What is an image?¶
- In previous lesson: a function- a 2D pattern of intensity values
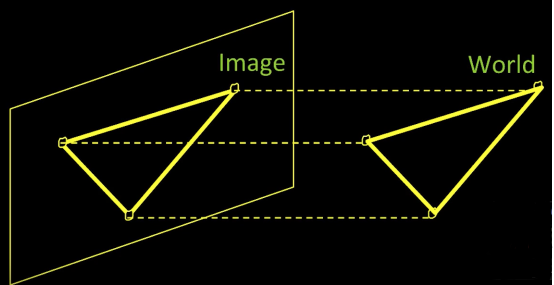
- Here: 1 2D projection of 3D points

Imaging System¶
What is a camera?¶
It's some device that allows the **projection** of light from three dimensions, to some medium (film, sensor,..etc) that will record the light pattern.
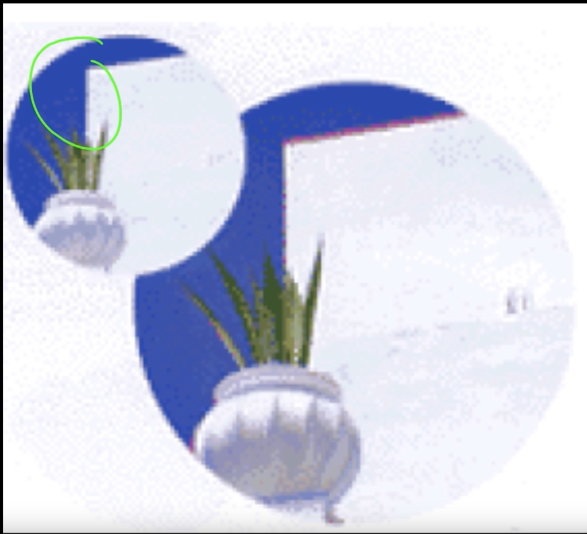
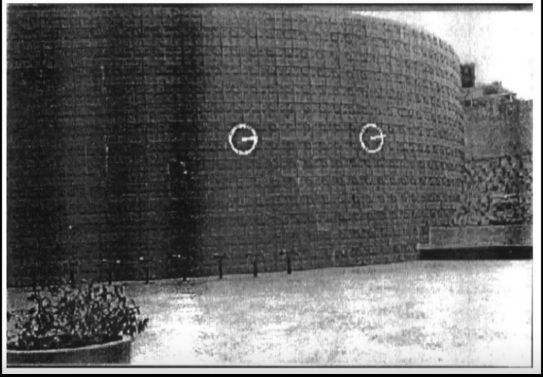
When you project a scene to the camera, you lose 3D information, and you have to find out what went out in the lost dimesnion. For instance, the image below were taken by a camera from front and right side. The projection from the right side shows the realistic depection of the globe painted on the side walk.
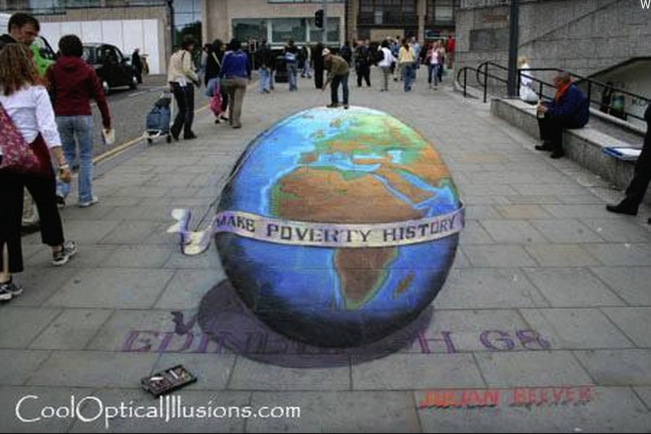

Image Formation¶
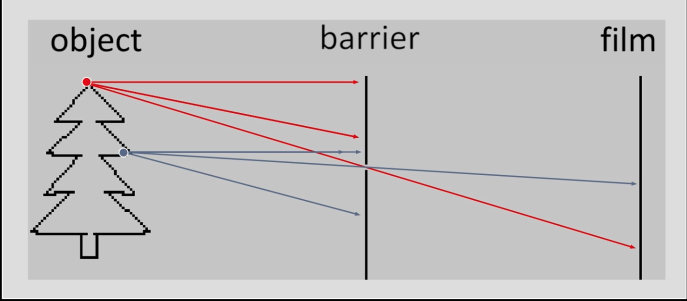
As shown in figure 3(a), a light is reflected from a point to a film will create an image. However, a single point will reflect lights all over the film. In order to solve this problem, we place a barrier, with a small holes (aperture) in it that each will allow single light through it to the film as in figure 3(b)

Aperture¶
How does aperture affect the image that we see? How does the size affect the image?
The bluriness of the image is directly related to the size of the arpeture. As the arpeture size decreases, the bluriness decrease and the crisper images are produced. Aperture sizes are in mm (e.g. 2mm, 1mm, 0.6mm, and 0.35mm)
Why not making the size very very small?
Because of diffraction effect due to the wave nature of light.

Lenses¶
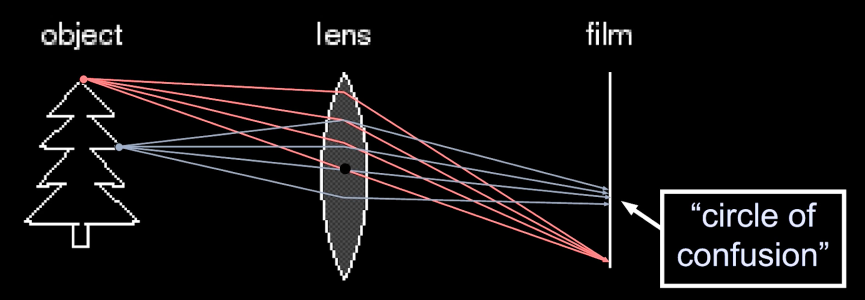
We don't really use pinhole cameras anymore. Instead, we use lenses. Lenses are desinged to project all lights comming from a point at a particular distance away to the same point on the film. However, as in Figure 5, the challange is that lights comming from different distance will be projected at slightly different points on the film (circle of confusion)
Lenses Components
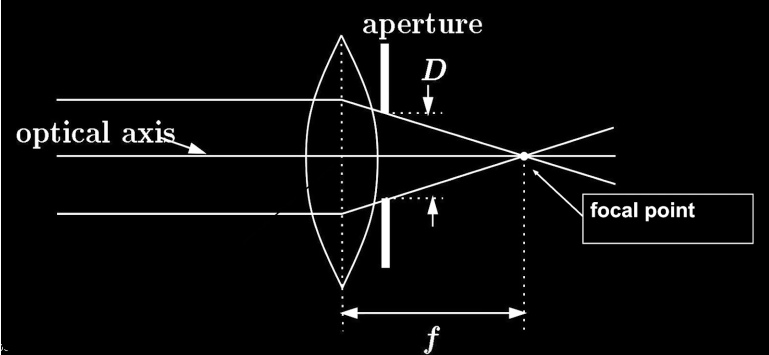
- Optical axis: light passes straight through unbent
- Paralell lights are all bent to the same point
- Focal point: a point where parallel lights are bent to
- Aperture: to reduce the amount of spread of things, by restricting the set of rays that are coming in.
Thin Lenses¶
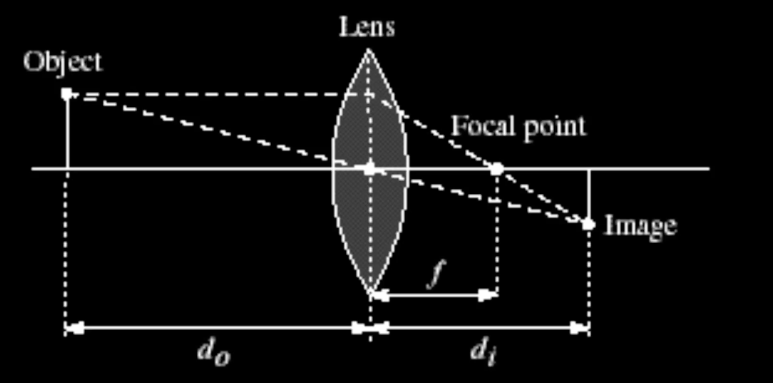

Can we predict the relationship between, say $\color{blue}{d_0}$ and $\color{blue}{d_i}$ given lens with a given focal point where $d_0$ is the distance of the object, and $d_i$ is the distance from the lens to the image (Figure 6(a))?
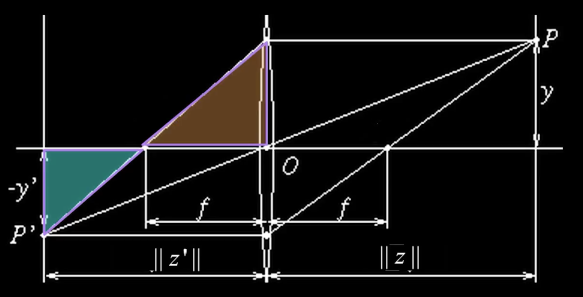
Using similar triangles in Figure 6(b), we can reason that given the point $P$ at $y$ and projected at point $P'$ at $-y$
$$\color{blue}{\frac{-y'}{y} = \frac{||z'||}{||z||}}$$
Also, using similar triangles in Figure 6(c), we can reason that
$$\color{blue}{\frac{-y'}{y} = \frac{||z'|| - f}{f}}$$
$$\color{blue}{\implies \frac{1}{||z||} = \frac{1}{f} - \frac{1}{||z'||}}$$
$$\color{blue}{\implies \frac{1}{f} = \frac{1}{||z||} + \frac{1}{||z'||}}$$
$y$: height of a point from the optical axis
$y'$: height of the projection of $P$ from the optical axis
$z$: distance to the world
$z'$: distance from lense to the image plane
So, any point that satisfy the thin lense Equation will be in focus. Hence, by moving the lense back and forward, we change where in the world things are in focus
Check out: http://www.phy.ntnu.edu.tw/ntnujava/index.php?topic=48
**Quize**

f = 50.0
z = [1000.0,2000.0] # in mm
for zi in z:
zp = 1/(1/f - 1/zi)
print("When Z1 == %f, Z' == %f" % (zi,zp))
Depth of field¶
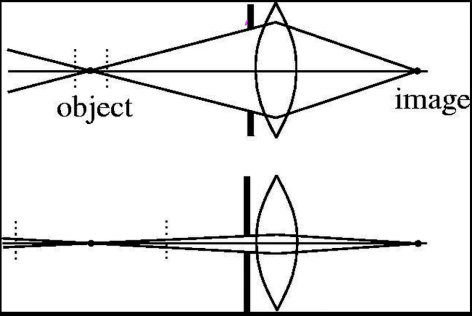
It is concerned with how much of focus change occurs for a certain point as the lense move in and out. The DoF is controlled by the aperture. With wide aperture, the rays diverge quite a bit, and hence moving the plane in a little bit cause the rays to spread out alot. On the other hand, with smaller aperture, the spread is much less as the plane is moving in (Figure 8a,b).

Field of View (zooming)¶
How wide of a view do we have. There are two types of lens that can change their field of view:
- changing focal lenght while staying in constant focus
- changing focal length but must refocus (variable focal length lenses)
When the focal length is high, the angular deflection moves the pixels drastically and thus any shake in the camera will shake the image greatly. So the more the focal length, the more we need to stabilize the camera.
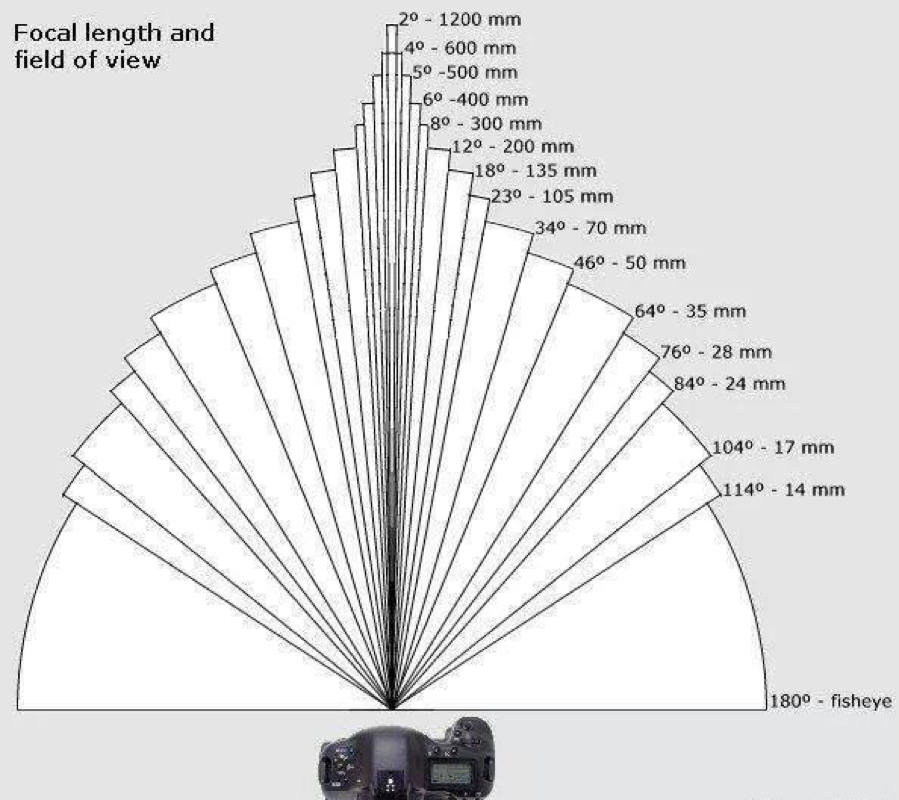

FOV depends on Focal Length¶

The field of view can be calculated by calculating the angle $\color{blue}{\phi}$ depected in Figure 9(c).
$$\color{blue}{\phi = tan^-1(\frac{d/2}{f})}$$
$\color{blue}{d}$: the retina or sensor size
Larger Focul Length $\implies$ Smaller FOV
Bigger the imaging surface $\implies$ Bigger FOV
**Quize**
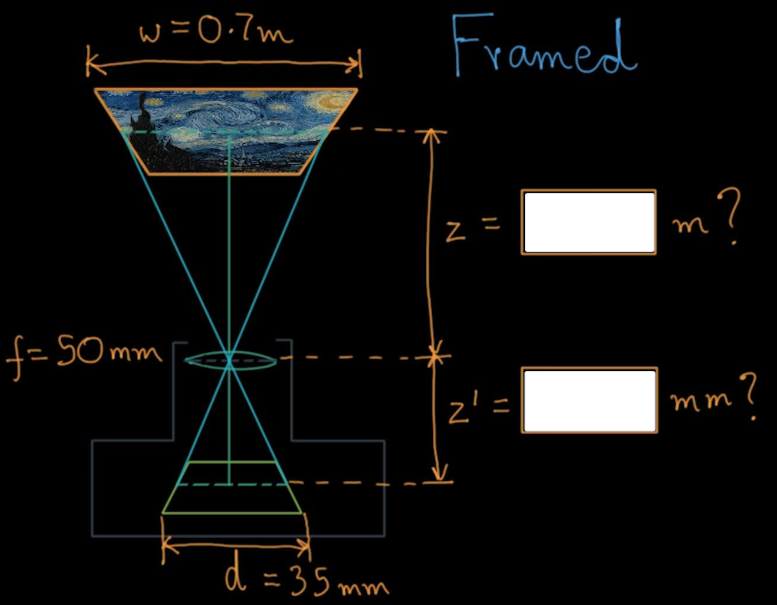
$$\color{blue}{\frac{1}{f} = \frac{1}{||z||} + \frac{1}{||z'||}}$$ $$\color{blue}{\implies \frac{1}{f} = \frac{z' + z}{z'z}}$$ $$\color{blue}{\implies fz' + fz = zz'}$$ $$\color{blue}{\implies fz' = zz' - fz}$$ $$\color{blue}{\implies fz' = z(z' - f)}$$ $$\color{blue}{\implies z = \frac{z'f}{z'-f} \,\,(1)}$$
$$\color{blue}{\frac{d/2}{z'} = \frac{w/2}{z}}$$ $$\color{blue}{\implies z = \frac{w/d}{z'} \,\,(2)}$$
$$\color{blue}{\implies \frac{z'f}{z'-f} = \frac{w/d}{z'}}$$ $$\color{blue}{\implies w(z'-f) = df}$$ $$\color{blue}{\implies z' -f = \frac{df}{w}}$$ $$\color{blue}{\implies z' = \frac{df}{w} + f}$$
import numpy as np
w = 0.7*1000 #to mm
f = 50
d = 35
zp = d*f/w + f ## df/w + f
z = zp*w/d ## z = z'w/d
print(z/1000,zp) # to m
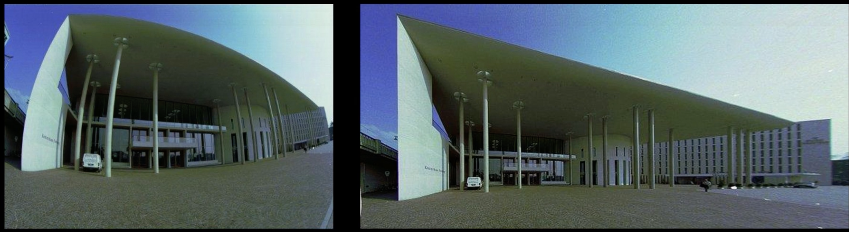
Zooming and Moving are not the same¶
In Figure 10(a), the image on the left image were taken with a large FOV, and small $f$ while the camera is close to the car. The image on the right, on the other hand, is taken with small FOV, and large $f$ while the camera is far from the car. You can notice that the shape is different. The left image has what is called Perspctive Distortion.
Figure 10(b) gives another example of Perspctive Distortion as we minimize $f$ and move closer to the face


Dolly Zoom¶
When the camera move closer and closer to an object while widening the lense at the same time, the object in the middle will have the same size, and to maintain its stationary point. However, this will create an illusionary scene where the stuff on the outside will grow.

Lenses Are Not Perfect¶
There are many problems that might arise from lenses, photographers, or the scene.
Geometric Distortion¶
You can correct geometric distortion in post-imaging tools like photoshop if you know the focal length of your camera Figure 12(b)

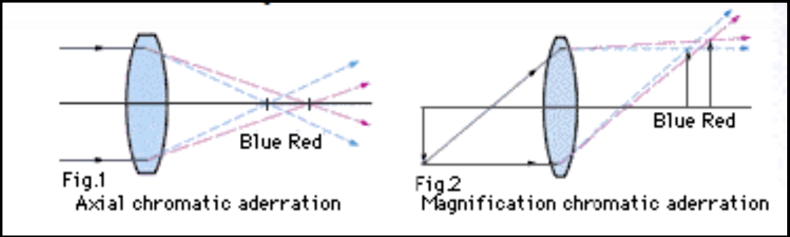
Chromatic Aberration¶
This problem happens when rays of different wavelength focus in different planes. The problem is how to get all lights from a certain point to land on same point on the image. Notice the red line in the bigger picture in Figure 12(d)
Vignetting¶
With some camera settings, not all rays that are hitting in the middle of the image are being caught at the corners.


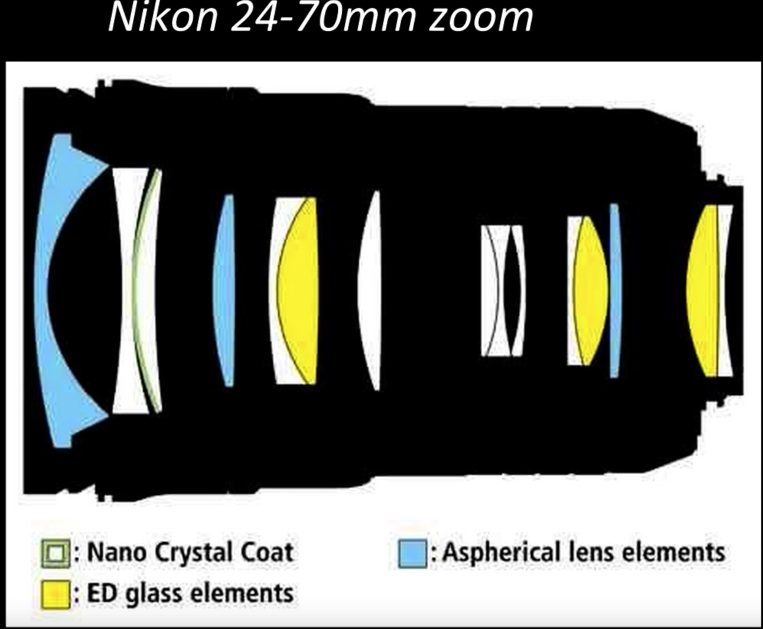
Lense Systems¶
Advanced cameras have multiple lenses. The camera in Figure 13 has 15 lenses that change according to the need.
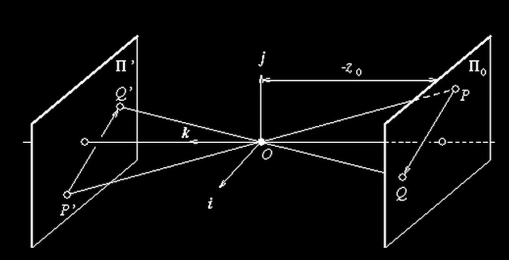
Coordinate Systems¶
- Using the pinhole model as an approximation
- Put the optical center (Center of Projection) at the origin
- Standard (x,y) Coordinate System
- Put the image plane (Projection Plane) in front of the COP (for math convenient)
- The cameral looks down the negative z axis
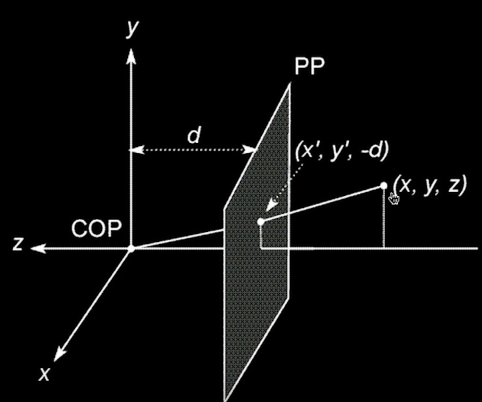
Projection Equations¶
- Compute intersection with Perspective Projection of ray from (x,y,z) to COP
- Derived using similar triangles
$$\color{blue}{(X,Y,Z) -> (-d\frac{X}{Z},-d\frac{Y}{Z},-d)}$$
So, we can get the projection by throwing out the last coordinate:
$$\color{blue}{(x', y') = (-d\frac{X}{Z},-d\frac{Y}{Z})}$$
**When dividing by Z, distant objects are smaller
**Quize**
When objects are very far away, the real X and real Z can be huge. If I move the camera (the origin), those numbers hardly change. This explains:
a) Why the moon follows you
b) Why the North Star is always North
c) Why you can tell time from the Sun regardless of where you are?
d) All of the above
Homogeneous Coordinates¶
Is this a linear transformation?
No- division by the (not constant) Z is non-linear
Trick: add one more coordinate:
Homogeneous image (2D) coordinates$\,\,\,(x,y)\,\,\, \Rightarrow \begin{bmatrix} x \\ y \\ 1\end{bmatrix} $
Homogeneous scene (3D) coordinates$\,\,\,(x,y,z) \Rightarrow \begin{bmatrix} x \\ y \\ z \\ 1\end{bmatrix} $
Converting from homogeneous coordinates:¶
$$\color{blue}{\begin{bmatrix} x \\ y \\ w\end{bmatrix} \,\,\, \Rightarrow \,\,\,(x/w,y/w)}$$
$$\color{blue}{\begin{bmatrix} x \\ y \\ z \\ w\end{bmatrix} \,\,\, \Rightarrow \,\,\,(x/w,y/w,z/w)}$$
**This makes homogenous coordinates invariant under scale
Perspective Projection¶
projetion is a matrix multiply using homogeneous coordinates:
$$\color{blue}{\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & \frac{1}{f} & 0 \end{bmatrix}\begin{bmatrix} x \\ y \\ z \\ 1\end{bmatrix} = \begin{bmatrix} x \\ y \\ \frac{z}{f}\end{bmatrix} \,\,\, \Rightarrow \,\,\,(f\frac{x}{z},f\frac{y}{z})}$$
$$\color{blue}{\Rightarrow (u,v)}$$
$f$: is the focal length, the distance from the center of projection to the image plane
How does scaling the projection matrix change the transformation?
$$\color{blue}{\begin{bmatrix} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix}\begin{bmatrix} x \\ y \\ z \\ 1\end{bmatrix} = \begin{bmatrix} fx \\ fy \\ z \end{bmatrix} \,\,\, \Rightarrow \,\,\,(f\frac{x}{z},f\frac{y}{f})}$$
**So invariant under scale
**Quize**
Given Point p in 3-space[x y z] and focal length f, write a function that returns the location of the projected point on 2D image plane [u v]
import numpy as np
def project(p,f):
A = np.array([[1,0,0,0],[0,1,0,0],[0,0,1/f,0]])
p = np.append(p,1)
mul = np.matmul(A,p.T)
return (mul[0]/mul[2],mul[1]/mul[2])
p1 = np.array([200,100,50])
p2 = np.array([200,100,100])
f = 50
print(project(p1,f))
print(project(p2,f))
Geometric properties of projection¶
- Points go to points
- Lines go to lines
- Polygons go to polygons

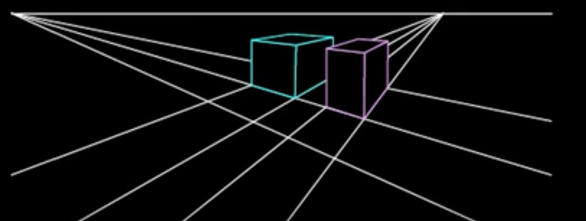
Parallel Lines in the World Meet in the Image (Vanishing) point¶
Line in 3-space
$$\color{blue}{x(t) = x_0 + at}$$ $$\color{blue}{y(t) = y_0 + bt}$$ $$\color{blue}{z(t) = z_0 + ct}$$
$\color{blue}{x_0, y_0,z_0}$: is starting point
$\color{blue}{at,bt,zt}$: moving on vector
Perspective projection of the line¶
$$\color{blue}{x'(t) = \frac{fx}{z} = \frac{f(x_{0} + at)}{z_0 + ct}}$$
$$\color{blue}{y'(t) = \frac{fy}{z} = \frac{f(y_{0} + bt)}{z_0 + ct}}$$
In the limit as $\color{blue}{t \rightarrow \pm}$ we have (for $\color{blue}{c \neq 0}$) :
$$\color{blue}{x'(t) \rightarrow \frac{fa}{c}, \,\,\,\, y'(t) \rightarrow \frac{fb}{c}}$$
regardless of their starting point (that is $\color{blue}{x_0\,\, and\,\, y_0}$)

Vanishing Points¶
- Each set of parallel lines (=direction) meets at a different point.
- The line is called the horizon for that plane
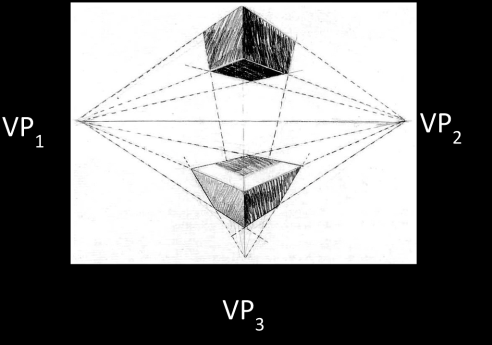
3-point perspective¶
Different directions correspond to different vanishing points

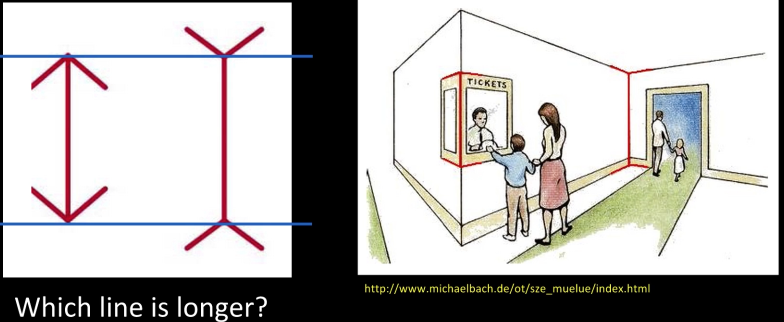
Human Vision (Muller-Lyer illusion)¶

**Quize**
What determines at what point in the image parallel lines intersect?
a) The direction the lines have in the world
b) Whether the world lines are on the ground plane
c) The orientation of the camera
d) (a) and (c)
Other models¶
Orthograpphic Projection¶
Special case of perspective projection
- Distance from the COP to the image plane is infinite
- Also called 'parallel projection': (x,y,z) -> (x,y)
- The projection matrix is:
$$\color{blue}{\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} x \\ y \\ z \\ 1\end{bmatrix} = \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \,\,\, \Rightarrow \,\,\,(x,y)}$$
Week Perspective¶
- Perspective effects, but not over the scale of individual objects
$$\color{blue}{(x,y,z) \,\,\,\, \rightarrow (\frac{fx}{z_0},\frac{fy}{z_0})}$$
$$\color{blue}{\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & \frac{1}{s} \end{bmatrix}\begin{bmatrix} x \\ y \\ z \\ 1\end{bmatrix} = \begin{bmatrix} x \\ y \\ \frac{1}{s} \end{bmatrix} \,\,\, \Rightarrow \,\,\,(sx,sy)}$$

Why multiple views¶
- Structure and depth are inherently ambiguous from single views


**Quize**
When you look at in image, what property indicate difference in depth, or provides hints about object shape?
motion, parallel lines, shadow, textured, focus/blur, lighting/shading, occlusion, size and scale
How do human see in 3D¶
Perspective effect

Shading

Texture
Focus/defocus
- Image from same point of view, different camera parameters
- 3d shape/ depth estimates
Motion

Estimating scene shape from one eye¶
- "Shape from X": Shading, Texture, Focus, Motion....
- Very popular circa 1980
But we have two eyes!¶
Stereo:
- The image from one eye is a little different than the image from the other eye
- Think of shape from "motion" between two views
- Infer 3D shape of scene from two (multiple) images from different viewpoints
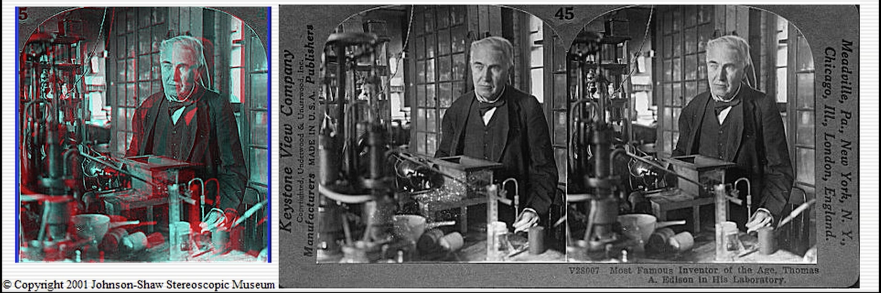
Stereo Photography and Stereo Viewers¶
Take two pictures of the same subject from slightly different viewpoints and display so that each eye sees only one of the images.
Analygph stereo: put down sort of red and blue imageery and use filters to see each image from an eye
Stereo Basic Idea¶
The image below shows an alternation of the two images that slightly differ. Watch lecture for explanation
Random Dot Stereograms¶
Human binuclar fusion is not based upon matching large-scale structure, or any indiviual process of the image. It is acutally based on a low-level process that directly fuses the two images.
Watch the lesson for more explanation
Estimating Depth with Stereo¶
- Assume we have two cameras, and they're both looking at some scene point, the 3D depth of a point can be recunstruected by figuring out which two points in the two cameras are that point
- Stereo: shape from "motion" between two views. We'll need to consider:
- Image point correspondences
- Info on camera pose ("calibration")

Geometry for a simple stereo system¶
- First, assuming parallel optical axes, known camera parameters (i.e., calibrated cameras) (Figure 26)
- Figure is looking down on the cameras and image plane
- Baseline $\color{blue}{B}$, focal length $\color{blue}{f}$
- Point $\color{blue}{p}$ is distance $\color{blue}{Z}$ in camera coordinate systems
- $\color{blue}{Z}$ is the distance all the way to center of projection (COP) not image plane. Review previous lesson
- Point $\color{blue}{P}$ projects into left and right images.
- Distance is positive in left image and negative in right

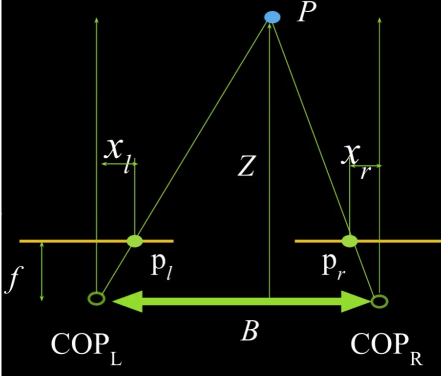
What is the expression for $Z$?
- Similar triangles ($\color{blue}{p_l}$, $\color{blue}{P}$, $\color{blue}{p_r}$) and ($\color{blue}{C_l}$, $\color{blue}{P}$, $\color{blue}{C_r}$)

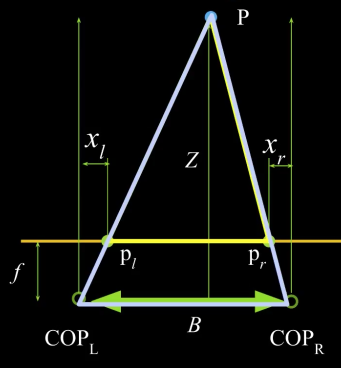
So,
$$\color{blue}{\frac{B - x_l + x_r}{Z-f} = \frac{B}{Z}}$$
$$\color{blue}{\Rightarrow \,\,\,\, Z = f \frac{B}{x_l - x_r}}$$
What happens when disparity ($\color{blue}{x_l - x_r}$) is zero?
- At some point in the scene, the point is projected at the same point in the left and the right images, and thus the depth is infinit. (e.g. the moon)
**Quize**
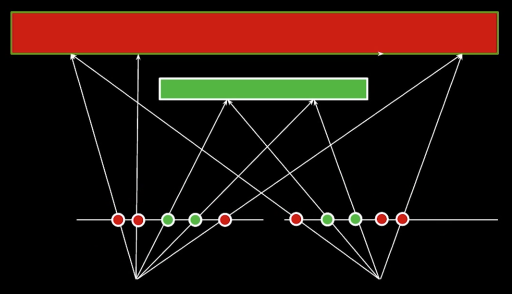
Which image is the left and which is right?

Left is in the left image, and Right in the right one. Because we know that the person is in front of the tree, that means image on the person in the right image should be shifted to the left
Depth from disparity¶
More on the video


%matplotlib inline
import numpy as np
import cv2
from matplotlib import pyplot as plt
import PIL
from io import BytesIO
from IPython.display import clear_output, Image as NoteImage, display
def imshow(im,fmt='jpeg'):
#a = np.uint8(np.clip(im, 0, 255))
f = BytesIO()
PIL.Image.fromarray(im).save(f, fmt)
display(NoteImage(data=f.getvalue()))
def imread(filename):
img = cv2.imread(filename)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
return img
imgL = cv2.imread('imgs/SuXT483.png',0)
imgR = cv2.imread('imgs/Yeuna9x.png',0)
stereo = cv2.StereoBM_create(numDisparities=16, blockSize=7)
disparity = stereo.compute(imgL,imgR)
fig, ax = plt.subplots(ncols=3)
fig.set_size_inches((15,25))
ax[0].imshow(imgL,'gray')
ax[1].imshow(imgR,'gray')
ax[2].imshow(disparity,'gray')
plt.show()

Stereo Correspondence Constraints¶
General case, with calibrated cameras¶
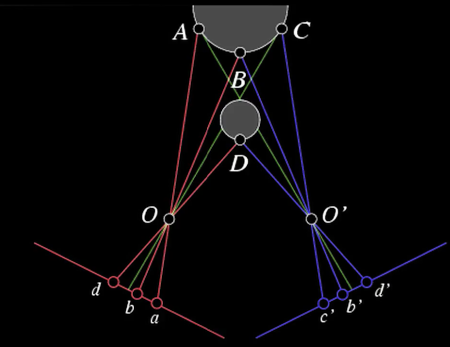
- The two cameras need not have parallel optical axes and image planes
- Cameras can be parallel or converged
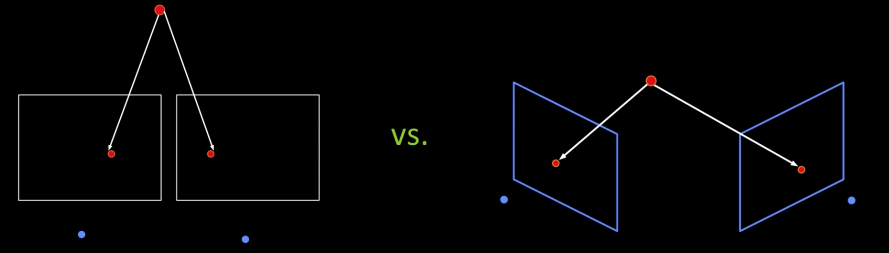
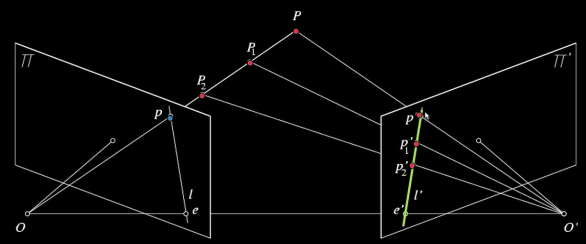
- Remember: in prespective projection, lines project into lines
- So, the line containing the center of projection and the point P in the left image must project to a line in the right image Figure(28 b).

Terms¶
Epipolar constraint¶
Geometry of two views constrains where the corresponding pixel for some image point in the first view must occur in the second view.
Baseline: line joining the camera centers
- Epipolar plane for a given piont: plane containing baseline and world point
- Epipolar line: intersection of epipolar plane with the image plain - come in pairs
- Epipole: point of intersection of baseline with the image plane
Epipolar Constraint¶
The epipolar constraint reduces the correspondence problem to a 1D search along an epipolar line.


Converging cameras¶
Where is the epipole?
Somewhere outside the image but not in the infinity.
Explanation in the lecture

Parallel image planes¶
Where is the epipole?
At the infinity
Explanation in the lecture
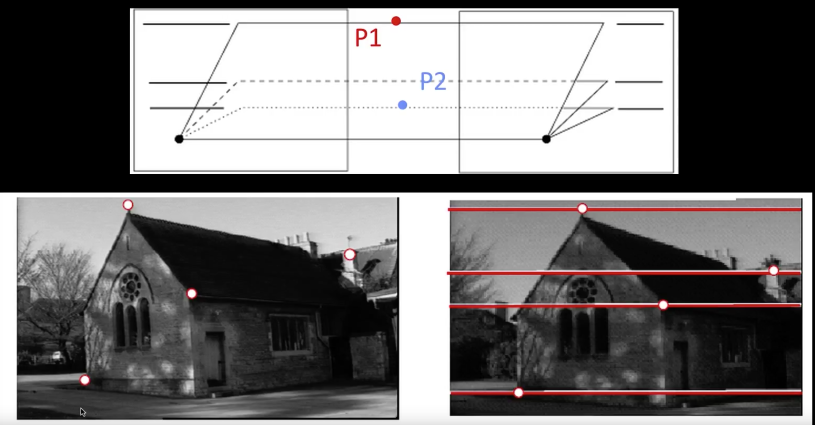
Quiz

How do we know that (B) has parallel image planes?
a) The epipolar lines are horizontal
b) The epipolar lines are parallel
c) Because I just said that (B) had parallel image plane
import cv2
import numpy as np
from matplotlib import pyplot as plt
img1 = cv2.imread('imgs/left.jpg',0) #queryimage # left image
img2 = cv2.imread('imgs/right.jpg',0) #trainimage # right image
sift = cv2.xfeatures2d.SIFT_create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
# FLANN parameters
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
matches = flann.knnMatch(des1,des2,k=2)
good = []
pts1 = []
pts2 = []
# ratio test as per Lowe's paper
for i,(m,n) in enumerate(matches):
if m.distance < 0.8*n.distance:
good.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
pts1 = np.int32(pts1)
pts2 = np.int32(pts2)
F, mask = cv2.findFundamentalMat(pts1,pts2,cv2.FM_LMEDS)
# We select only inlier points
pts1 = pts1[mask.ravel()==1]
pts2 = pts2[mask.ravel()==1]
def drawlines(img1,img2,lines,pts1,pts2):
''' img1 - image on which we draw the epilines for the points in img2
lines - corresponding epilines '''
r,c = img1.shape
img1 = cv2.cvtColor(img1,cv2.COLOR_GRAY2BGR)
img2 = cv2.cvtColor(img2,cv2.COLOR_GRAY2BGR)
for r,pt1,pt2 in zip(lines,pts1,pts2):
color = tuple(np.random.randint(0,255,3).tolist())
x0,y0 = map(int, [0, -r[2]/r[1] ])
x1,y1 = map(int, [c, -(r[2]+r[0]*c)/r[1] ])
img1 = cv2.line(img1, (x0,y0), (x1,y1), color,1)
img1 = cv2.circle(img1,tuple(pt1),3,color,-1)
img2 = cv2.circle(img2,tuple(pt2),3,color,-1)
return img1,img2
# Find epilines corresponding to points in right image (second image) and
# drawing its lines on left image
lines1 = cv2.computeCorrespondEpilines(pts2.reshape(-1,1,2), 2,F)
lines1 = lines1.reshape(-1,3)
img5,img6 = drawlines(img1,img2,lines1,pts1,pts2)
# Find epilines corresponding to points in left image (first image) and
# drawing its lines on right image
lines2 = cv2.computeCorrespondEpilines(pts1.reshape(-1,1,2), 1,F)
lines2 = lines2.reshape(-1,3)
img3,img4 = drawlines(img2,img1,lines2,pts2,pts1)
fig = plt.gcf()
fig.set_size_inches((20,15))
plt.subplot(121),plt.imshow(img5)
plt.subplot(122),plt.imshow(img3)
plt.show()

😢 Unfortunately, I couldn't find a stereo image for Messi!!!. Messi had a fracture of the radial bone in his right arm yesturday against Sevilla. He will be out for approximately three weeks. 😢¶
injuredMessi = imread('injuredMessi.jpg')
imshow(injuredMessi)

def display_pair(imgs,titles):
plt.gray()
plt.figure(figsize=(20,20))
plt.subplot(121)
ax = plt.gca()
ax.xaxis.set_major_locator(plt.NullLocator())
ax.yaxis.set_major_locator(plt.NullLocator())
plt.imshow(imgs[0])
plt.title(titles[0], size=20)
if len(imgs)> 1:
plt.subplot(122)
plt.imshow(imgs[1])
plt.title(titles[1], size=20)
ax = plt.gca()
ax.xaxis.set_major_locator(plt.NullLocator())
ax.yaxis.set_major_locator(plt.NullLocator())
fig = plt.gcf()
fig.tight_layout()
plt.show()
def resize(image,size):
return cv2.resize(image, size)
injuredMessi2 = imread('imgs/injuredMessi2.jpg')
Tsubasa = imread('imgs/Tsubasa.jpg')
injuredMessi2 = resize(injuredMessi2,(Tsubasa.shape[1],Tsubasa.shape[0]))
display_pair([injuredMessi2,Tsubasa],['',''])

For now assume parallel image planes¶
- Assume parallel (co-planar) image planes
- Assume same focal lengths
- Assume epipolar lines are horizontal
- Assume epipolar lines are at the same $y$ location in the image...
Correspondence problem¶
Multiple match hypotheses satisfy epipolar constraint, but which is correct?
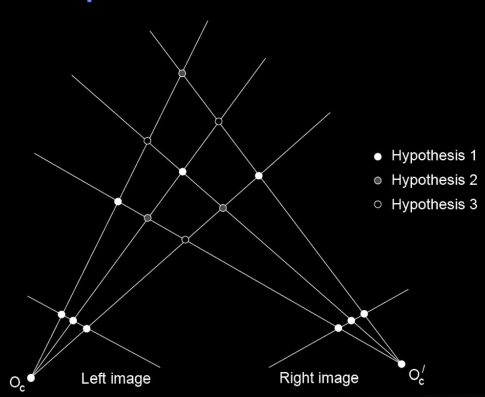
Beyond the hard constraint of epipolar geometry, there are "soft" constraints to help identify corresponding points.
- Similarity: pixel in the right is similar to pixel in the left
- Uniqueness: there is no more than one match of pixel in the left in the right image
- Ordering: if ABC in the left, ABC on the right
- Disparity gradient is limited: the depth doesn't change very quickly
To find matchies in the image pair, we will assume
- Most scene points visible from both views
- Image regions for the matches are similar in appearance
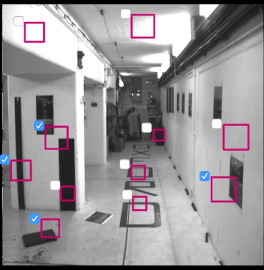
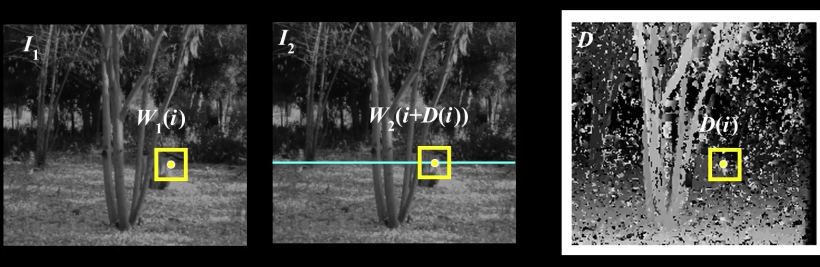
Dense correspondence search¶
For each pixel/window in the left image:
- Compare with every pixel/window on same epipolar line in right image
- Pick position with minimum match cost( e.g. SSD, normalized correlation)

def red(im):
return im[:,:,0]
def green(im):
return im[:,:,1]
def blue(im):
return im[:,:,2]
def gray(im):
return cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
def square(img,center,size,color=(0,255,0)):
y,x = center
leftUpCorner = (x-size,y-size)
rightDownCorner = (x+size,y+size)
cv2.rectangle(img,leftUpCorner,rightDownCorner,color,3)
def normalize_img(s):
start = 0
end = 255
width = end - start
res = (s - s.min())/(s.max() - s.min()) * width + start
return res.astype(np.uint8)
def line(img,x):
cv2.line(img,(0,x),(img.shape[1],x),(255,0,0),3)
def mse(imageA, imageB):
# the 'Mean Squared Error' between the two images is the
# sum of the squared difference between the two images;
# NOTE: the two images must have the same dimension
err = np.sum((imageA.astype("float") - imageB.astype("float")) ** 2)
err /= float(imageA.shape[0] * imageA.shape[1])
# return the MSE, the lower the error, the more "similar"
# the two images are
return err
def dense_correspondence_search(point,imgL,imgR,windowSize,disparity_fun=mse):
def clip(img,center,windowSize):
x,y = center
half = windowSize//2
return img[x-half:x+half+1,y-half:y+half+1]
queryWindow = clip(imgL,point,windowSize)
row = point[0]
disparity = [(col,disparity_fun(queryWindow,clip(imgR,(row,col),windowSize)))
for col in np.arange(windowSize//2,
imgR.shape[1]-imgR.shape[1]%window_size,
windowSize)]
return np.array(disparity)
def calculate_disparity_img(imgL,imgR,numDisparities=32, blockSize=5):
stereo = cv2.StereoBM_create(numDisparities=numDisparities, blockSize=blockSize)
disparity = stereo.compute(imgL,imgR)
disparity[disparity<0] = 0
return disparity
point = (200,500)
window_size = 11
redPalaceLeft = imread("imgs/red_palace_l.jpg")
redPalaceRight = imread("imgs/red_palace_r.jpg")
annotatedLeft = redPalaceLeft.copy()
annotatedRight = redPalaceRight.copy()
## Finding disparity
disparity = dense_correspondence_search(point,gray(redPalaceLeft),
gray(redPalaceRight),window_size)
## Finding minimum disparity
dindex, dvalues = disparity[:,0],disparity[:,1]
minIndex = np.argmin(dvalues)
minY = int(dindex[minIndex])
rightPoint = (point[0],minY)
## Annotating
square(annotatedLeft,point,window_size)
line(annotatedRight,point[0])
square(annotatedRight,rightPoint,window_size)
display_pair([annotatedLeft,annotatedRight],["left","right"])
print("Disparity")
plt.plot(dvalues)


Dense Correspondence Problem¶
point = (500,500)
window_size = 11
redPalaceLeft = imread("imgs/red_palace_l.jpg")
redPalaceRight = imread("imgs/red_palace_r.jpg")
annotatedLeft = redPalaceLeft.copy()
annotatedRight = redPalaceRight.copy()
## Finding disparity
disparity = dense_correspondence_search(point,gray(redPalaceLeft),
gray(redPalaceRight),window_size)
## Finding minimum disparity
dindex, dvalues = disparity[:,0],disparity[:,1]
minIndex = np.argmin(dvalues)
minY = int(dindex[minIndex])
rightPoint = (point[0],minY)
## Annotating
square(annotatedLeft,point,window_size)
line(annotatedRight,point[0])
square(annotatedRight,rightPoint,window_size)
display_pair([annotatedLeft,annotatedRight],["left","right"])
print("Disparity")
plt.plot(dvalues)


Quiz
Which region are good for dense search?
Effect of window size¶
point = (500,500)
window_sizes = [5,7,9,11,13,15,17,19,21]
redPalaceLeft = imread("imgs/red_palace_l.jpg")
redPalaceRight = imread("imgs/red_palace_r.jpg")
annotatedLeft = redPalaceLeft.copy()
annotatedRight = redPalaceRight.copy()
squares = []
disparities = []
for window_size in window_sizes:
## Finding disparity
disparity = dense_correspondence_search(point,gray(redPalaceLeft),
gray(redPalaceRight),window_size)
## Finding minimum disparity
dindex, dvalues = disparity[:,0],disparity[:,1]
minIndex = np.argmin(dvalues)
minY = int(dindex[minIndex])
rightPoint = (point[0],minY)
## Annotating
square(annotatedLeft,point,window_size)
line(annotatedRight,point[0])
square(annotatedRight,rightPoint,window_size)
disparities.append(disparity[:,1])
display_pair([annotatedLeft,annotatedRight],["left","right"])
fig, axs = plt.subplots(ncols=3,nrows=3)
fig = plt.gcf()
fig.set_size_inches((20,15))
import itertools
index = list(itertools.product(range(3), range(3)))
for c,w,d in zip(range(len(window_sizes)),window_sizes,disparities):
ax = axs[index[c][0],index[c][1]]
ax.plot(d)
ax.set_title("Window size: %d" % w)


redPalaceLeft = gray(imread("imgs/red_palace_l.jpg"))
redPalaceRight = gray(imread("imgs/red_palace_r.jpg"))
window_sizes = [5,7,9,11,13,15,25,33,41]
disparities = []
for w in window_sizes:
## Finding disparity
disparity = calculate_disparity_img(redPalaceLeft,redPalaceRight,
numDisparities=16,blockSize=w)
disparities.append(disparity)
display_pair([redPalaceLeft,redPalaceRight],["left","right"])
fig, axs = plt.subplots(ncols=3,nrows=3)
fig = plt.gcf()
fig.set_size_inches((20,15))
import itertools
index = list(itertools.product(range(3), range(3)))
for c,w,d in zip(range(len(window_sizes)),window_sizes,disparities):
ax = axs[index[c][0],index[c][1]]
ax.imshow(d,'gray')
ax.set_title("Window size: %d" % w)


Occlusion¶
Uniqueness constraint¶
No more than one match in right image for every point in left image.
Note the second most right pixel in the right image and the second most left pixel in the left image in the figure below. These pixels are only visible to one image but not the other
Ordering Constraint¶
The image below shows an example of a violation of ordering constraints happens because of a narrow occluding surface.
Stereo Results¶
Better solutions¶
Beyond individual correspondences to estimate disparities:
- Optimize correspondence assignments jointly
- Scanline at a time (DP)
- Full 2D grid (graph cuts)
Dynamic Programming Formulation¶
Review the lecture
Coherent stereo on 2D grid- DP¶
Scanline stereo generates streaking artificats. Can't use dynamic programming to find spatially coherent disparities/ correspondences on a 2D grid

What defines a good stereo correspondence?
- Match quality: Want each pixel to find a good appearance match in the other image
- Smoothness: of two pixels are adjacent, they should (usually) move about the same amount
Stereo matching as energy minimization¶
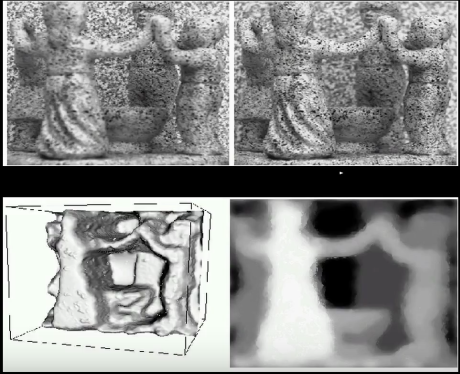
Better Results and Challenges¶
- Energy functions of this form can be minimized using graph cuts

The below is the results produced by the Implementation of graph cuts
imgL = cv2.imread('imgs/red_palace_l.jpg',0)
imgR = cv2.imread('imgs/red_palace_r.jpg',0)
disparity = cv2.imread('imgs/red_palace_disp.png')
fig, ax = plt.subplots(ncols=2)
fig.set_size_inches((15,25))
ax[0].imshow(imgL,'gray')
ax[0].set_title("Left")
ax[1].imshow(imgR,'gray')
ax[1].set_title("Right")
fig, ax = plt.subplots(ncols=1)
fig.set_size_inches((15,25))
ax.set_title("Disparity Using graph cuts")
ax.imshow(disparity)
plt.show()


Review Model Projection¶
Projection equations:
- Compute intersection with Perspective Projection of ray from (x,y,z) to COP
- Derived using similar triangles $$\color{blue}{(X,Y,Z) -> (-d\frac{X}{Z},-d\frac{Y}{Z},-d}$$ (assumes normal Z negative - we will change later)
- We get the projection by throwing out the last coordinate:
$$\color{blue}{(x',y') = (-d\frac{X}{Z},-d\frac{Y}{Z})}$$
Homogeneous coordinates¶
Perspective Proejction¶
More above
Geometric Camera Calibration¶
- We want to use the camera to tell us things about the world
- So we need the relationship between coordinates in the world and coordinates in the image: geometric camera calibration
- For reference see Forsyth and Ponce, sections 1.2 and 1.3
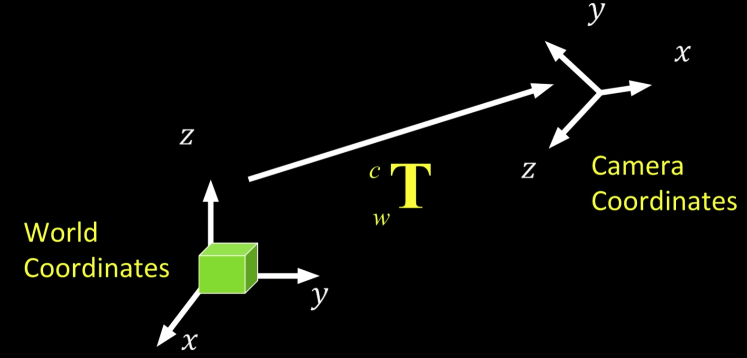
Composed of 2 trnasformation
- From some (arbitraty) world coordinate system to the camera's 3D coordinate system. Extrinsic parameters (or camera pose)
- From the 3D coordinates in the camera frame to the 2D image plane via projection. Intrinsic parameters
Camera Pose¶
Quiz
How many degrees of freedom are there in specifying the extrinsic parameters?
a) 5
b) 6
c) 3
d) 9
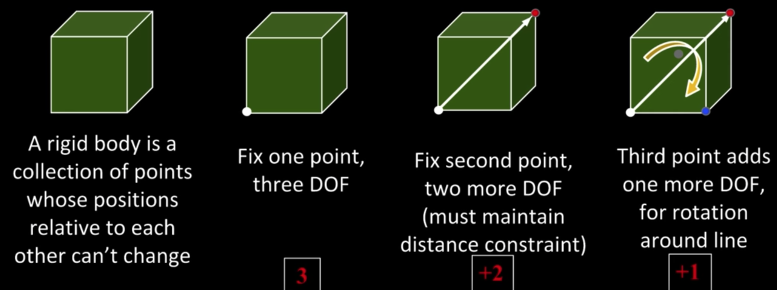
Rigid Body Transformation¶
Need a way to specify the six degrees-of-freedom of a rigid body why 6?
- Moving in space
- Rotating around the vertical and the horizontal axis
- Rotating around diagonal axis
Notation (from F&P)¶
- Superscript references coordinate frame
- $\color{blue}{p^A}$ is coordinates of P in frame A
- $\color{blue}{p^B}$ is coordinates of P in frame B
$$\color{blue}{p^A = \begin{bmatrix} x^A \\ y^A \\ z^A \end{bmatrix} \Leftrightarrow \overline{OP} = (x^A \cdot \overline{i_A}) + (y^A \cdot \overline{j_A}) + (z^A \cdot \overline{k_A})}$$
Translation Only¶
$$\color{blue}{p^B = p^A + (O_A)^B}$$
Using homogeneous coordinates, translation can be expressed as a matrix multiplication.
$$\color{blue}{ p^B = (O_A)^B + p^A}$$
$$\color{blue}{\begin{bmatrix} p^B \\ 1 \end{bmatrix} = \begin{bmatrix} I & (O_A)^B \\ 0^T & 1 \end{bmatrix} \begin{bmatrix} p^A \\ 1 \end{bmatrix}}$$
Rotation¶
$$\color{blue}{ \overline{OP} = \begin{bmatrix} i_A & j_A & k_A\end{bmatrix} \begin{bmatrix} x^A \\ y^A \\ z^A\end{bmatrix} = \begin{bmatrix} i_B & j_B & k_B\end{bmatrix}\begin{bmatrix} x^B \\ y^B \\ z^B\end{bmatrix} }$$
$$\color{blue}{ p^B = R^B_A\,P^A}$$
$\color{blue}{R^B_A}$: means describing frame A in the coordinate system of frame B

What does R look like?¶
$$\color{blue}{R^B_A = \begin{bmatrix}i_A i_B&j_A i_B&k_A i_B\\i_A j_B&j_A j_B&k_A j_B\\i_A k_B&j_A k_B&k_A k_B \end{bmatrix}}$$
$$\color{blue}{ = \begin{bmatrix}i_A^B & j_A^B & k_A^B \end{bmatrix}}$$
$$\color{blue}{ = \begin{bmatrix}i^{A(T)}_B \\ j^{A(T)}_B \\ k^{A(T)}_B \end{bmatrix}}$$
T is the transpose
Example: Rotation about z axis¶

What is the rotation matrix?
$$\color{blue}{R_z(\theta) = \begin{bmatrix} cos(\theta) & -sin(\theta) & 0 \\s in(\theta) & cos(\theta) & 0 \\ 0 & 0 & 1 \end{bmatrix}}$$
Combine 3 to get arbitrary rotation¶
- Euler angles: Z, X', Z''
- Or heading, pitch, roll: world Z, new X, new Y
- Or roll, pitch, and yaw
- Or Azimuth, elevation, roll
- Three basic matrices: order matters, but we'll not focus on that
$$\color{blue}{R_x(\varphi) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & cos(\varphi) & -sin(\varphi) \\ 0 & sin(\varphi) & cos(\varphi) \end{bmatrix}}$$
$$\color{blue}{R_z(\theta) = \begin{bmatrix} cos(\theta) & -sin(\theta) & 0 \\s in(\theta) & cos(\theta) & 0 \\ 0 & 0 & 1 \end{bmatrix}}$$
$$\color{blue}{R_y(\kappa) = \begin{bmatrix} cos(\kappa) 0 & & -sin(\kappa) \\ 0 & 1 & 0 \\s in(\kappa) & 0 & cos(\kappa) \end{bmatrix}}$$
Rotation in homogeneous coordinates¶
- Using homogeneous coordinates, rotation can be expressed as a matrix multiplication.
$$\color{blue}{ p^B = R^B_A\,P^A}$$
$$\color{blue}{\begin{bmatrix} p^B \\ 1 \end{bmatrix} = \begin{bmatrix} I & O_A^B \\ 0^T & 1 \end{bmatrix} \begin{bmatrix} p^A \\ 1 \end{bmatrix}}$$
Rotation is not commutative
Rigid Transformation¶
$$ \color{blue}{p^B = R_A^Bp^A + (O_A)^B }$$
Unified treatment using homogeneous coordinates:
$$\color{blue}{\begin{bmatrix} p^B \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & O_A^B \\ 0^T & 1 \end{bmatrix}\begin{bmatrix} R_A^B & 1 \\ 0^T & 1 \end{bmatrix} \begin{bmatrix} p^A \\ 1 \end{bmatrix}}$$
$$\color{blue}{ = \begin{bmatrix} R_A^B &O_A^B\\ 0^T & 1 \end{bmatrix}\begin{bmatrix} p^A \\ 1 \end{bmatrix} }$$
And even better:
$$\color{blue}{ \begin{bmatrix} p^B \\ 1 \end{bmatrix} = \begin{bmatrix} R_A^B &O_A^B\\ 0^T & 1 \end{bmatrix}\begin{bmatrix} p^A \\ 1 \end{bmatrix} = T^B_A\begin{bmatrix} p^A \\ 1 \end{bmatrix} }$$
$$\color{blue}{ \begin{bmatrix} p^A \\ 1 \end{bmatrix} = T^A_B\begin{bmatrix} p^B \\ 1 \end{bmatrix} = (T^B_A)^-1\begin{bmatrix} p^B \\ 1 \end{bmatrix}}$$
Translation and Rotation¶
From frame A to B:
Non-homogeneous ("regular") coordinates:
$$\color{blue}{\overrightarrow{p}^B = R_A^B \overrightarrow{p}^A + \overrightarrow{t^B_A} }$$
$$\color{blue}{\overrightarrow{p}^B = \begin{bmatrix} &&&|\\ &R_A^B&&\overrightarrow{t^B_A}\\&&&|\\0&0&0&1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z\\1 \end{bmatrix} }$$
Homogenous coordinates allows us to write coordinate transforms as a single matrix!
From World to Camera¶
Non-homogeneous coordinates $$\color{blue}{\overrightarrow{p}^C = R_W^C\,\, \overrightarrow{p}^W + \overrightarrow{t}^C_W }$$
$\color{blue}{\overrightarrow{p}^C}$: Point in the camera frame
$\color{blue}{\overrightarrow{p}^W }$: Point in world frame
$\color{blue}{R_W^C}$: Rotation from world to camera frame
$\color{blue}{\overrightarrow{t}^C_W}$: Translation from world to camera frame
$$\color{blue}{\begin{bmatrix} \\ \overrightarrow{p}^C \\ \\ \\ \end{bmatrix} = \begin{bmatrix} -&-&-&|\\ -&R_W^C&-&\overrightarrow{t^C_W}\\-&-&-&|\\0&0&0&1 \end{bmatrix} \begin{bmatrix} \\ \overrightarrow{p}^W \\ \\ \\ \end{bmatrix} }$$
From world to camera is the extrinsic parameter matrix (4X4)
Quiz
How many degrees of freedom are there in 3X4 extrinsic parameter matrix?
a) 12
b) 6
c) 9
d) 3
Three angles that controls the rotation matrix and three values that controls the translation
Showing Translation¶
from transforms3d.affines import compose
import numpy as np
P1 = np.array([[0],[0],[0],[1]])
P2 = np.array([[0],[3],[1.5],[1]])
P3 = np.array([[0],[0],[3],[1]])
T = [0, 0, 10] # translations
R = [[1, 0, 0], [0, 1, 0], [0, 0, 1]] # rotation matrix
Z = [1, 1, 1] # zooms
A = compose(T, R, Z)
TP1 = np.matmul(A,P1)
TP2 = np.matmul(A,P2)
TP3 = np.matmul(A,P3)
xdata = [P1[0],P2[0],P3[0],TP1[0],TP2[0],TP3[0]]
ydata = [P1[1],P2[1],P3[1],TP1[1],TP2[1],TP3[1]]
zdata = [P1[2],P2[2],P3[2],TP1[2],TP2[2],TP3[2]]
import matplotlib.pyplot as plt
from mpl_toolkits import mplot3d
fig = plt.figure(figsize=(15,15))
ax = plt.axes(projection='3d')
ax.scatter3D(xdata, ydata, zdata, cmap='Greens');
ax.plot([P1[0][0],P2[0][0]],[P1[1][0],P2[1][0]],zs=[P1[2][0],P2[2][0]],c="red")
ax.plot([P1[0][0],P3[0][0]],[P1[1][0],P3[1][0]],zs=[P1[2][0],P3[2][0]],c="blue")
ax.plot([P2[0][0],P3[0][0]],[P2[1][0],P3[1][0]],zs=[P2[2][0],P3[2][0]],c="green")
ax.plot([TP1[0][0],TP2[0][0]],[TP1[1][0],TP2[1][0]],zs=[TP1[2][0],TP2[2][0]],c="red")
ax.plot([TP1[0][0],TP3[0][0]],[TP1[1][0],TP3[1][0]],zs=[TP1[2][0],TP3[2][0]],c="blue")
ax.plot([TP2[0][0],TP3[0][0]],[TP2[1][0],TP3[1][0]],zs=[TP2[2][0],TP3[2][0]],c="green")
plt.show()

Showing Rotation¶
from transforms3d.euler import euler2mat, mat2euler
import matplotlib.pyplot as plt
from mpl_toolkits import mplot3d
def plot_square(TP,ax):
p1 = TP[0].flatten(); p2 = TP[1].flatten(); p3 = TP[2].flatten(); p4 = TP[3].flatten();
ax.plot([p1[0],p2[0]],[p1[1],p2[1]],zs=[p1[2],p2[2]],c="red")
ax.plot([p2[0],p3[0]],[p2[1],p3[1]],zs=[p2[2],p3[2]],c="blue")
ax.plot([p3[0],p4[0]],[p3[1],p4[1]],zs=[p3[2],p4[2]],c="green")
ax.plot([p4[0],p1[0]],[p4[1],p1[1]],zs=[p4[2],p1[2]],c="yellow")
########
x_angle = 0
y_angle = 0
z_angle = 0
R1 = euler2mat(x_angle, y_angle, z_angle, 'sxyz')
x_angle = 0
y_angle = 0
z_angle = -np.pi / 2
R2 = euler2mat(x_angle, y_angle, z_angle, 'sxyz')
x_angle = 0
y_angle = np.pi / 2
z_angle = 0
R3 = euler2mat(x_angle, y_angle, z_angle, 'sxyz')
########
P1 = np.array([[0],[0],[0],[1]])
P2 = np.array([[0],[1],[0],[1]])
P3 = np.array([[0],[1],[1],[1]])
P4 = np.array([[0],[0],[1],[1]])
PS = [P2,P3,P4,P1]
T1 = [0, 0, 0] # No Translations
T2 = [1, 0, 0] # X-Translations
T3 = [0, 1, 0] # Y-Translations
Z = [1, 1, 3] # zooms
A1 = compose(T1, R1, Z) # No Rotation
A2 = compose(T1, R2, Z) # Rotation about Z-axis
A3 = compose(T1, R3, Z) # Rotation about Y-axis
A4 = compose(T2, R1, Z) # X-Translation
A5 = compose(T3, R2, Z) # Y-Translation + Rotation about Z-axis
fig = plt.figure(figsize=(15,15))
ax = plt.axes(projection='3d')
plot_square([np.matmul(A1,p) for p in PS],ax)
plot_square([np.matmul(A2,p) for p in PS],ax)
plot_square([np.matmul(A3,p) for p in PS],ax)
plot_square([np.matmul(A4,p) for p in PS],ax)
plot_square([np.matmul(A5,p) for p in PS],ax)
plt.show()

Ideal intrinsic parameters¶
Ideal Perspective projection:¶
$$\color{blue}{u = f\frac{x}{z}}$$
$$\color{blue}{v = f\frac{y}{z}}$$

Real intrinsic parameters(1)¶
But "pixels" are in some arbitrary spatial units
$$\color{blue}{u = \alpha\frac{x}{z}}$$
$$\color{blue}{v = \alpha\frac{y}{z}}$$
Real intrinsic parameters(2)¶
Maybe pixels are not square
$$\color{blue}{u = \alpha\frac{x}{z}}$$
$$\color{blue}{v = \beta\frac{y}{z}}$$
Real intrinsic parameters(3)¶
We don't know the origin of our camera pixel coordinates
$$\color{blue}{u = \alpha\frac{x}{z} + u_0}$$
$$\color{blue}{v = \beta\frac{y}{z}+v_0}$$
Real intrinsic parameters(4)¶
May be skew between camera pixel axes
$$\color{blue}{v'sine(\theta) = v}$$
$\color{blue}{$u' = u - cos(\theta)v' = u - cot(\theta)v}$$
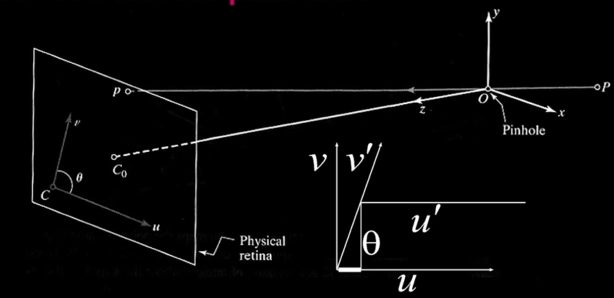
Really ugle intrinsic parameters (4)¶
$$\color{blue}{u= \alpha\frac{x}{z}-\alpha cot(\theta)\frac{y}{z} + u_0}$$ $$\color{blue}{v = \frac{\beta}{sin(\theta)}\frac{y}{z} + v_0}$$
Improving Intrinsic Parameters¶
$$\color{blue}{ \begin{bmatrix}z*u \\ z*v \\ z \end{bmatrix} = \begin{bmatrix} \alpha&-\alpha cot(\theta)&u_0&0\\ 0&\frac{\beta}{sin(\theta)}&v_0&0\\0&0&1&0 \end{bmatrix} \begin{bmatrix} x \\ y \\ z\\1 \end{bmatrix} }$$
$$\color{blue}{\overrightarrow{p'} = K \overrightarrow{p}^C }$$
$\color{blue}{\overrightarrow{p'}}$: in homogeneous pixel
$\color{blue}{\overrightarrow{p}^C}$: in camera-based 3D coords
K: Intrinsic matrix
Kinder, gentler intrinsics¶
- Can use simpler notation for intrinsics, remove last column whihc is zero:
$$\color{blue}{K = \begin{bmatrix}f&s&c_x\\0&af&c_y\\0&0&1\end{bmatrix}}$$
f: focal length
s: skew
a: aspect ratio
$c_x,c_y$: offset
(5 DOF)
- If sqaure pixels, no skew, and optical center is in the center (assume origin in the middle):
$$\color{blue}{K = \begin{bmatrix}f&0&0\\0&f&0\\0&0&1\end{bmatrix} }$$
Quiz
Thhe intrinsics have the following: a focal length, a pixel x size, a pixel y size, two offsets and a skew. That's 6. But we've said there only 5 DOFS. What happened?
a) Because $f$ always multiplies the pixel sizes, those 3 numbers are really only 2 DOFs
b) In modern cameras, the skew is always zero, so we don't count it.
c) In CCDs or CMOS cameras, the aspect is carefully controlled to be 1.0, so it is no longer modeled
Combining Extrinsic and Intrinsic Calibration Parameters¶
$$\color{blue}{\overrightarrow{p'} = K \overrightarrow{p}^C }$$
$$\color{blue}{\begin{bmatrix} \\ \overrightarrow{p}^C \\ \\ \\ \end{bmatrix} = \begin{bmatrix} -&-&-&|\\ -&R_W^C&-&\overrightarrow{t^C_W}\\-&-&-&|\\0&0&0&1 \end{bmatrix} \begin{bmatrix} \\ \overrightarrow{p}^W \\ \\ \\ \end{bmatrix} }$$
$\color{blue}{\overrightarrow{p'}}$ : Pixels
$\color{blue}{\overrightarrow{p^W}}$ : World coordinate
$\color{blue}{\overrightarrow{p}^C}$: Camera 3D coordinates
$\color{blue}{\overrightarrow{p}^W}$: World 3D coordinates
K: 3X3 (no need for the 1 at the bottom of the matrix) or 3X4
$$\color{blue}{\overrightarrow{p'} = K(R_W^C \,\, \overrightarrow{t}_W^C) \overrightarrow{p}^W}$$
$\color{blue}{(R_W^C \,\, \overrightarrow{t}_W^C)}$: 3X4
$$\color{blue}{\overrightarrow{p'} = M \,\, \overrightarrow{p}^W}$$
Other Ways to Write the Same Equation¶
$$\color{blue}{ \begin{bmatrix} u\\v\\1 \end{bmatrix} \simeq \begin{bmatrix}s*u \\ s*v \\ s \end{bmatrix} = \begin{bmatrix} \cdot & m^T_1 & \cdot &\cdot\\ \cdot & m^T_2& \cdot & \cdot \\\cdot & m^T_3 & \cdot & \cdot\end{bmatrix}\begin{bmatrix} P_x^W \\ P_y^W \\P_z^W \\1\end{bmatrix}}$$
$$\color{blue}{u = \frac{m_1\cdot \overrightarrow{P}}{m_3\cdot \overrightarrow{P}} }$$ $$\color{blue}{v = \frac{m_2\cdot \overrightarrow{P}}{m_3\cdot \overrightarrow{P}} }$$
$\color{blue}{\simeq}$: projectively similar
Camera Parameters¶
- A camera (and its matrix) M (or $\color{blue}{\Pi}$) is described by several parameters
- Translation T of the optical center from the origin of the world coordinates
- Rotation R of the camera system
- focal length and aspect (f,a) [or pixel size $(s_x,s_y)$], principle point $\color{blue}{(x'_c,y'_c)}$, and skew (s)
- blue parameters are called extrinsics, red are intrinsics
$$\color{blue}{ X \simeq \begin{bmatrix} sx\\sy\\s \end{bmatrix} = \begin{bmatrix} * & * & * & * \\ * & * & * & * \\ * & * & * & * \end{bmatrix} \begin{bmatrix} X\\Y\\Z \\ 1 \end{bmatrix} = MX} $$
$$\color{blue}{ M = \begin{bmatrix}f&s&x'_c\\0&af&y'_c\\0&0&1\end{bmatrix} \begin{bmatrix}1&0&0&0\\0&1&0&0\\0&0&1&0\end{bmatrix}\begin{bmatrix} R_{3X3} & 0_{3X1}\\0_{1X3} & 1\end{bmatrix}\begin{bmatrix} I_{3X3} & T_{3X1}\\0_{1X3} & 1\end{bmatrix}} $$
There are 11 DoFs: 5 + 0 + 3 + 3
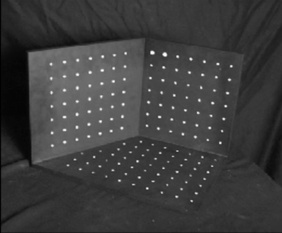
Calibration using known points¶
Place a known object in the scene
- Identify correspondence between image and scene
- compute mapping from scene to image
Resectioning¶
Estimating the camera matrix from known 3D points Projective Camera Matrix
$$\color{blue}{ p = K\begin{bmatrix}R & t \end{bmatrix}P = MP
\begin{bmatrix}w*u\\w*v\\w \end{bmatrix} = \begin{bmatrix}
m_{11} & m_{12} & m_{13} & m_{14} \\
m_{21} & m_{22} & m_{23} & m_{24} \\
m_{31} & m_{32} & m_{33} & m_{34} \\
m_{41} & m_{42} & m_{43} & m_{44}
\end{bmatrix}\begin{bmatrix}X \\Y \\Z \\1 \end{bmatrix}}$$

Direct linear calibration - homogeneous¶
$$\color{blue}{\begin{bmatrix} u_i \\ v_i \\ 1 \end{bmatrix} \cong \begin{bmatrix}w*u_i\\w*v_i\\w \end{bmatrix} = \begin{bmatrix} m_{00} & m_{01} & m_{02} & m_{03} \\ m_{10} & m_{11} & m_{12} & m_{13} \\ m_{20} & m_{21} & m_{22} & m_{23} \\ m_{30} & m_{31} & m_{32} & m_{33} \end{bmatrix}\begin{bmatrix}X \\Y^i \\Z^i \\1^i \end{bmatrix}}$$
One pair of equations for each point
$$\color{blue}{ u_i = \frac{m_{00}X_i + m_{01}Y + m_{02}Z + m_{03}}{m_{20}X_i + m_{21}Y + m_{22}Z + m_{23}}}$$
$$\color{blue}{ v_i = \frac{m_{10}X_i + m_{11}Y + m_{12}Z + m_{13}}{m_{20}X_i + m_{21}Y + m_{22}Z + m_{23}}}$$
$$\color{blue}{u_i(m_{20}X_i + m_{21}Y + m_{22}Z + m_{23}) = m_{00}X_i + m_{01}Y + m_{02}Z + m_{03}}$$
$$\color{blue}{ v_i(m_{20}X_i + m_{21}Y + m_{22}Z + m_{23}) = m_{10}X_i + m_{11}Y + m_{12}Z + m_{13}}$$
$$\color{blue}{\begin{bmatrix}X_i & Y_i&Z_i&1&0&0&0&-u_iX_i&-u_iY_i & -u_iZ_i -u_i\\ X_i & Y_i&Z_i&1&0&0&0&-v_iX_i&-v_iY_i & -v_iZ_i -v_i \end{bmatrix}\begin{bmatrix} m_{00}\\ m_{10}\\ m_{02}\\ m_{03}\\ m_{10}\\ m_{11}\\ m_{12}\\ m_{13}\\ m_{20}\\ m_{21}\\ m_{22}\\ m_{23} \end{bmatrix} =\begin{bmatrix} 0 \\ 0\end{bmatrix}}$$
- This is a homogenous set of equations.
- When over constrained, defines a least squares problem - minimize $||Am||$
- Since m is only defined up to scale, solve for unit vector m*
- Solution: m = eigenvector of $A^TA$ with smallest eigenvalue
- Works with 6 or more points
The SVD (singular value decomposition) Trick Part1¶
$$\color{blue}{\begin{bmatrix} X_i & Y_i&Z_i&1&0&0&0&-u_iX_i&-u_iY_i & -u_iZ_i -u_i\\ X_i & Y_i&Z_i&1&0&0&0&-v_iX_i&-v_iY_i & -v_iZ_i -v_i \\ &&&&&.&&&& \\ &&&&&.&&&& \\ &&&&&.&&&& \\ X_n & Y_n&Z_n&1&0&0&0&-u_nX_n&-u_nY_n & -u_nZ_n -u_n\\ X_n & Y_n&Z_n&1&0&0&0&-v_nX_n&-v_nY_n & -v_nZ_n -v_n \end{bmatrix}\begin{bmatrix} m_{00}\\ m_{10}\\ m_{02}\\ m_{03}\\ m_{10}\\ m_{11}\\ m_{12}\\ m_{13}\\ m_{20}\\ m_{21}\\ m_{22}\\ m_{23} \end{bmatrix} =\begin{bmatrix} 0 \\ 0 \\ . \\ . \\ . \\ 0 \\ 0\end{bmatrix}}$$
A: 2n x 12
m: 12
0: 2n
- Find the m that minimizes $\color{blue}{||Am||}$ subject to $\color{blue}{||m|| = 1}$
- Let A = $\color{blue}{UDV^T}$ (singular value decomposition, D diagonal, U and V orthogonal)
- There minimizing $\color{blue}{||UDV^Tm||}$
- But, $\color{blue}{||UDV^Tm||}$ = $\color{blue}{||DV^Tm||}$ and $\color{blue}{||m|| = ||V^Tm||}$
- Thus minimize $\color{blue}{||DV^Tm||}$ subject to $\color{blue}{||v^Tm|| = 1}$
- Let $\color{blue}{y= V^Tm}$. Now minimize $\color{blue}{||Dy||}$ subject to $\color{blue}{||y|| = 1}$
- But D is diagonal, with decreasing values. So $\color{blue}{||Dy||}$ minimum is when $\color{blue}{y = (0,0,0,...,0,1)^T}$
- Since $\color{blue}{y = V^Tm}$, $\color{blue}{m = Vy}$ since $\color{blue}{V}$ orthogonal
- Thus $\color{blue}{m = Vy}$ is the last column in $\color{blue}{V}$
- And, the singular values of A are square roots of the eigenvalues of $\color{blue}{A^T}$ and the columns of V are the eigenvectors. (Show this? Nah...)
- Recap: Given Am=0, find the eigenvector of $\color{blue}{A^TA}$ with smallest eigenvalue, that's m
from scipy import linalg
m, n = 12, 6
a = np.random.randn(m, n) + 1.j*np.random.randn(m, n)
U, s, Vh = linalg.svd(a)
print(U.shape, s.shape, Vh.shape)
#Reconstruct the original matrix from the decomposition:
sigma = np.zeros((m, n))
for i in range(min(m, n)):
sigma[i, i] = s[i]
a1 = np.dot(U, np.dot(sigma, Vh))
np.allclose(a, a1)
#Alternatively, use full_matrices=False (notice that the shape of U is then (m, n) instead of (m, m)):
U, s, Vh = linalg.svd(a, full_matrices=False)
U.shape, s.shape, Vh.shape
S = np.diag(s)
np.allclose(a, np.dot(U, np.dot(S, Vh)))
s2 = linalg.svd(a, compute_uv=False)
np.allclose(s, s2)
More References¶
👽 We will borrow the image compression code from the taturial above to see apply it on Messi👽¶
# from https://github.com/rameshputalapattu/jupyterexplore
from numpy.linalg import svd
from skimage import img_as_ubyte,img_as_float
def compress_svd(image,k):
"""
Perform svd decomposition and truncated (using k singular values/vectors) reconstruction
returns
--------
reconstructed matrix reconst_matrix, array of singular values s
"""
U,s,V = svd(image,full_matrices=False)
reconst_matrix = np.dot(U[:,:k],np.dot(np.diag(s[:k]),V[:k,:]))
return reconst_matrix,s
def compress_show_color_images_reshape(img_name,k):
"""
compress and display the reconstructed color image using the reshape method
"""
image = img_as_float(imread(img_name))
original_shape = image.shape
image_reshaped = image.reshape((original_shape[0],original_shape[1]*3))
image_reconst,_ = compress_svd(image_reshaped,k)
image_reconst = image_reconst.reshape(original_shape)
compression_ratio =100.0* (k*(original_shape[0] + 3*original_shape[1])+k)/(original_shape[0]*original_shape[1]*original_shape[2])
title = "compression ratio={:.2f}".format(compression_ratio)+"%"
return image_reconst,title
img100,disc100 = compress_show_color_images_reshape("imgs/messi_p2.jpg",100)
img304,disc304 = compress_show_color_images_reshape("imgs/messi_p2.jpg",304)
img20,disc20 = compress_show_color_images_reshape("imgs/messi_p2.jpg",20)
fig, axs = plt.subplots(ncols=3,nrows=1)
fig.set_size_inches((20,5))
axs[0].imshow(img20)
axs[1].imshow(img100)
axs[2].imshow(img304)
axs[0].set_title(disc20)
axs[1].set_title(disc100)
axs[2].set_title(disc304)

⚽️ Fantástico Leo⚽️¶
Direct Linear Calibration Inhomogeneous¶
- Another approach: 1 in lower r.h. corner for 11 d.o.f
$$\color{blue}{\begin{bmatrix} u \\ v \\ 1 \end{bmatrix} \simeq \begin{bmatrix} m_{00} & m_{01} & m_{02} & m_{03} \\ m_{01} & m_{11} & m_{12} & m_{13} \\ m_{01} & m_{21} & m_{22} & 1 \\ \end{bmatrix}\begin{bmatrix}X \\Y \\Z \\1 \end{bmatrix}}$$
$$\color{blue}{ u_i = \frac{m_{00}X_i + m_{01}Y + m_{02}Z + m_{03}}{m_{20}X_i + m_{21}Y + m_{22}Z + 1}}$$
$$\color{blue}{ v_i = \frac{m_{10}X_i + m_{11}Y + m_{12}Z + m_{13}}{m_{20}X_i + m_{21}Y + m_{22}Z + 1}}$$
Dangerous if $m_{23}$ is really (near) zero
Direct Linear Calibration Transformation¶
Advantages
- Very simple to formulate and solve. Can be done, say on a problem set
- These methods are referred to as "algebraic error" minimization
Disadvantages:
- Doesn't directly tell you the camera parameters
- Approximate: e.g. doesn't model radial distortion
- Hard to impose constraints (e.g. known focal length)
- Mostly: doesn't minimize the right error function
Geometric Error¶
minimize $E = \sum_{i}d(x'_i, \hat{x}'_i)$
$\hat{x}'_i$: Predicted Image locations
$$min_M \sum_{i}d(x'_i, MX_i)$$

"Gold Standard" algorithm (Hartley and Zisserman)
Objective:
Given $n \geq 6$ 3D to 2D point correspondence ${X_i \leftrightarrow x'_i} $, determine the "Maximum Likelihood Estimation" of M
Algorithm:
(i) Linear Solution:
(a) (Optional) Normalization: $\tilde{X}_i = UX_i$ $\tilde{x}_i$ = $Tx_i$
(b) Direct Linear Transformation minimization
(ii) Minimize geometric error: using the linear estimate as a starting point minimize the geometric error:
The pure way¶
Finding the 3D Camera Center from M¶
- M encodes all the parameters. So we should be able to find things like the camera center from M
- Slight change in notation. Let: $\color{blue}{M = [Q | b]}$
M is (3X4) - b is the last column of $\color{blue}{M}$ - The center C is the null-space camera of projection matrix. So if find C such that:
$$\color{blue}{MC=0}$$
That will be the center
- Proof: Let X be somewhere between any point P and C
$$\color{blue}{X=\lambda P + (1 - \lambda)C}$$
And the projection: $$\color{blue}{x=MX= \lambda MP + (1 - \lambda)MC}$$
For any P, all points on PC ray project on image of P, therefor MC must be zero. So the camera center has to be in the null space
The easy way¶
- Now the easy way. A formula! If $\color{blue}{M = [Q|b]}$ then:
$$\color{blue}{ C=\begin{bmatrix}-Q^{-1}b\\1\end{bmatrix}}$$
Multi Plane Calibration¶
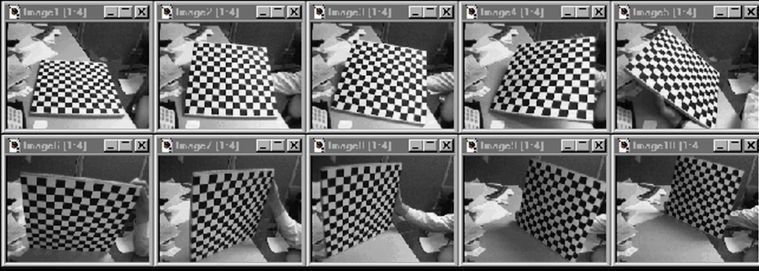
Advantage
- Only requires a plane
- Don't have to know positions/proientations
- Good code available online!
- OpenCV library
- Matlab version by Jean-Yves Bouget
- Zhengyou Zhang's website
import numpy as np
import cv2
import glob
def find_calibration(img,inner_dim=(9,6),crop=False):
# termination criteria
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((inner_dim[0]*inner_dim[1],3), np.float32)
objp[:,:2] = np.mgrid[0:inner_dim[0],0:inner_dim[1]].T.reshape(-1,2)
# Arrays to store object points and image points from all the images.
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
if type(img) == str:
img = cv2.imread(img)
else:
img = img
gray_im = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv2.findChessboardCorners(gray_im, (inner_dim[0],inner_dim[1]),None)
# If found, add object points, image points (after refining them)
if ret == True:
objpoints.append(objp)
corners2 = cv2.cornerSubPix(gray_im,corners,(11,11),(-1,-1),criteria)
imgpoints.append(corners2)
# Draw and display the corners
imgWithPoints = img.copy()
imgWithPoints = cv2.drawChessboardCorners(imgWithPoints, (inner_dim[0],inner_dim[1]), corners2,ret)
imshow(imgWithPoints)
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray_im.shape[::-1],None,None)
h, w = img.shape[:2]
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
if crop:
#crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
return (img,dst)
else:
return (img,img)
img,calibrated = find_calibration("imgs/calib_radial_easy.jpg",(7,6),crop=True)
display_pair([img,calibrated],["Original Image","Calibrated Image"])


from scipy.ndimage import rotate
# crop = True will fail
img,calibrated = find_calibration("imgs/calib_radial.jpg",(5,5),crop=False)
display_pair([img,calibrated],["Original Image","Calibrated Image"])

# Lets crop it from the side
from scipy.ndimage import rotate
img = imread("imgs/calib_radial.jpg")
img = img[:-40,80:-120,:]
img,calibrated = find_calibration(img,(9,6),crop=True)
display_pair([img,calibrated],["Original Image","Calibrated Image"])


🤴 From chapter 2, lets blend Messi with a chessboard image and see if we can calibrate the image 🤴¶
def resize(image,size):
return cv2.resize(image, size)
def multiply(image,factor):
return np.uint8(np.clip(factor*image, 0, 255))
def blend(img1,img2,factor):
return multiply(img1,factor)+multiply(img2,1-factor)
chess = imread("imgs/calib_radial.jpg")
chess = chess[:-20,80:-120,:]
messi = resize(imread("imgs/messi_p.jpg"),(chess.shape[1],chess.shape[0]))
bl = blend(messi,chess,0.4)
img,calibrated = find_calibration(bl,crop=True)
display_pair([img,calibrated],["Original Image","Calibrated Image"])


messi = resize(imread("imgs/messi_p2.jpg"),(chess.shape[1],chess.shape[0]))
bl = blend(messi,chess,0.2)
imshow(gray(bl))
img,calibrated = find_calibration(bl,crop=True)
display_pair([img,calibrated],["Original Image","Calibrated Image"])



😄Awesome😄¶
🤦 Yesturday, Lionel Messi scored twice but Barca slump to thrilling 4-3 defeat against Real Betis 🤦¶
👑Today, Lionel Messi was awarded La Liga best player and top goalscorer for the past season. Moreover, La Liga president Javier Tebas has proposed naming an award for the Spanish top flight's MVP after Lionel Messi. 👑¶

2D Transformation¶
Translation $$\color{blue}{x' = x + \overrightarrow{t}}$$ $$\color{blue}{x' =\begin{bmatrix}I & \overrightarrow{t}\end{bmatrix}\bar{x}}$$ $$\color{blue}{\bar{x}' = \begin{bmatrix}I & \overrightarrow{t}\\0^T&1\end{bmatrix}\bar{x}}$$ See above for example code
Projective Transformation¶
- Projective transformations: for 2D images it's a 3x3 matrix applied to homogenous coordinates
$$\color{blue}{\begin{bmatrix}x'\\y'\\w'\end{bmatrix} = \begin{bmatrix}a&b&c\\d&e&f\\g&h&i\end{bmatrix}\begin{bmatrix}x\\y\\w\end{bmatrix}}$$
- Translation
$$\color{blue}{\begin{bmatrix}x'\\y'\\1\end{bmatrix} = \begin{bmatrix}1&0&t_x\\0&1&t_y\\0&0&1\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}}$$
- Preserves:
- Lengths/Areas
- Angles
- Orientation
- Lines
- Euclidean (Rigid body)
$$\color{blue}{\begin{bmatrix}x'\\y'\\1\end{bmatrix} = \begin{bmatrix}cos(\theta)&-sin(\theta)&t_x\\sin(\theta)&cos(\theta)&t_y\\0&0&1\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}}$$
- Preserves:
- Lenghts/Areas
- Angles
- Lines
- Similarity (trans, rot, scale) transform
$$\color{blue}{\begin{bmatrix}x'\\y'\\1\end{bmatrix} = \begin{bmatrix}\alpha cos(\theta)&-\alpha sin(\theta)&t_x\\\alpha sin(\theta)&\alpha cos(\theta)&t_y\\0&0&1\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}}$$
- Preserves:
- Lenghts/Areas
- Angles
- Lines
- Affine transform
$$\color{blue}{\begin{bmatrix}x'\\y'\\1\end{bmatrix} = \begin{bmatrix}a&b&c\\d&e&f\\0&0&1\end{bmatrix}\begin{bmatrix}x\\y\\w\end{bmatrix}}$$
- Preserves:
- Parallel Lines
- Ratio of Areas
- Lines
Projective Trasformation¶
- Remember, these are homogeneous coordinates
$$\color{blue}{\begin{bmatrix}x'\\y'\\1\end{bmatrix} \cong \begin{bmatrix}sx'\\sy'\\s\end{bmatrix} = \begin{bmatrix}a&b&c\\d&e&f\\g&h&i\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}}$$
- General projective trasform (or Homography)
$$\color{blue}{\begin{bmatrix}x'\\y'\\1\end{bmatrix} \cong \begin{bmatrix}wx'\\wy'\\w\end{bmatrix} = \begin{bmatrix}a&b&c\\d&e&f\\g&h&i\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}}$$
- Preserves:
- Lines
- Also cross ratios
Quiz 1:¶
Suppose I told you the transform from image A to image B is a translation. How many pairs of corresponding points would you need to know to compute transformation?
a) 3
b) 1
c) 2
d) 4
Quiz 2:¶
Suppose I told you the transform from image A to image B is a affine. How many pairs of corresponding points would you need to know to compute transformation?
a) 3
b) 1
c) 2
d) 4
Quiz 3:¶
Suppose I told you the transform from image A to image B is a homography. How many pairs of corresponding points would you need to know to compute transformation?
a) 3
b) 1
c) 2
d) 4
LETS DO MESSI STUFF ¶
import numpy as np
transform = lambda tx,ty,theta,alpha,p: np.matmul(
np.array([[alpha*np.cos(theta),-1*alpha*np.sin(theta),tx],
[alpha*np.sin(theta),alpha*np.cos(theta),ty],
[0,0,1]]),p.T)
# translation
x,y = 10, 10
p1 = np.array([x,y,1])
p2 = transform(0,0,np.pi/2,1,p1)
print(p1,p2)
import scipy
messi = imread("imgs/messi_training.jpg")
# translation
b_p = np.array([[455,486,1],[530,480,1],
[450,560,1],[530,560,1]])
tx,ty = 0, -250
theta = 0
alpha = 1
t_p = transform(tx,ty,theta,alpha,b_p).astype(np.int).T
messi[t_p[0][0]:t_p[1][0],t_p[0][1]:t_p[3][1]] = messi[b_p[0][0]:b_p[1][0],b_p[0][1]:b_p[3][1]]
imshow(messi)

🤔 Without Looking, Where is the added ball 🤔¶
# rotate
messi_2 = messi[0:530,400:650]
imshow(messi_2)
rot = scipy.ndimage.rotate(messi_2,-50,cval=255)
imshow(rot)


😴 Rotation is not soo cool 😴¶
Projective plane¶
What is the geometric intuition of using homogeneous coordinates?
- A point in the image is a ray in projective space

Each point (x,y) on the plane (at z=1) is represented by a ray (sx,sy,s)
All points on the ray are equivalent:
$$\color{blue}{(x,y,1) \cong (sx,sy,s)}$$
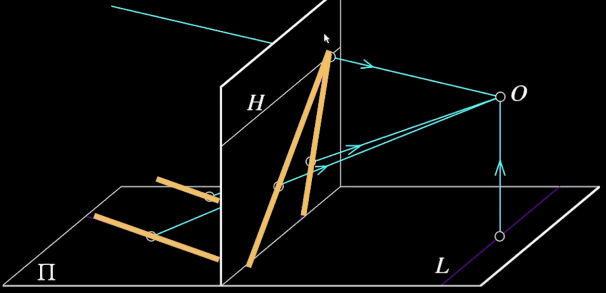
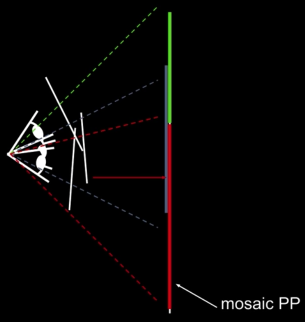
Image reprojection¶
Basic question:
How to relate to images from the same camera center?
How to map a pixel from projective plane PP1 to PP2?
Answer:
- Cast a ray through each pixel in PP1
- Draw the pixel where that ray intersects PP2
Observation:
- Rather than thinking of this as a 3D reprojection, think of it as a 2D image wrap from one image (plane) to another (plane)

Application: Simple mosaics¶
Basic Procedure
- Take a sequence of images from the same position
- Rotate the camera about its optical center
- Compute transformation between second image and first
- Transform the second image to overlap with the first
- Blend the two together to creae a mosaic
- (If there are more images, repeat)
## Code from: https://www.pyimagesearch.com/2016/01/11/opencv-panorama-stitching/
import numpy as np
import imutils
import cv2
class Stitcher:
def __init__(self):
# determine if we are using OpenCV v3.X
self.isv3 = imutils.is_cv3()
def stitch(self, images, ratio=0.75, reprojThresh=4.0,
showMatches=False):
# unpack the images, then detect keypoints and extract
# local invariant descriptors from them
(imageB, imageA) = images
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
# match features between the two images
M = self.matchKeypoints(kpsA, kpsB,
featuresA, featuresB, ratio, reprojThresh)
# if the match is None, then there aren't enough matched
# keypoints to create a panorama
if M is None:
return None
# otherwise, apply a perspective warp to stitch the images
# together
(matches, H, status) = M
result = cv2.warpPerspective(imageA, H,
(imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
# check to see if the keypoint matches should be visualized
if showMatches:
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches,
status)
# return a tuple of the stitched image and the
# visualization
return (result, vis)
# return the stitched image
return result
def detectAndDescribe(self, image):
# convert the image to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# check to see if we are using OpenCV 3.X
if self.isv3:
# detect and extract features from the image
descriptor = cv2.xfeatures2d.SIFT_create()
(kps, features) = descriptor.detectAndCompute(image, None)
# otherwise, we are using OpenCV 2.4.X
else:
# detect keypoints in the image
detector = cv2.FeatureDetector_create("SIFT")
kps = detector.detect(gray)
# extract features from the image
extractor = cv2.DescriptorExtractor_create("SIFT")
(kps, features) = extractor.compute(gray, kps)
# convert the keypoints from KeyPoint objects to NumPy
# arrays
kps = np.float32([kp.pt for kp in kps])
# return a tuple of keypoints and features
return (kps, features)
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB,
ratio, reprojThresh):
# compute the raw matches and initialize the list of actual
# matches
matcher = cv2.DescriptorMatcher_create("BruteForce")
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
# loop over the raw matches
for m in rawMatches:
# ensure the distance is within a certain ratio of each
# other (i.e. Lowe's ratio test)
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
matches.append((m[0].trainIdx, m[0].queryIdx))
# computing a homography requires at least 4 matches
if len(matches) > 4:
# construct the two sets of points
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# compute the homography between the two sets of points
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC,
reprojThresh)
# return the matches along with the homograpy matrix
# and status of each matched point
return (matches, H, status)
# otherwise, no homograpy could be computed
return None
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
# initialize the output visualization image
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
# loop over the matches
for ((trainIdx, queryIdx), s) in zip(matches, status):
# only process the match if the keypoint was successfully
# matched
if s == 1:
# draw the match
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
# return the visualization
return vis
import cv2
imageA = cv2.imread("imgs/sedona_left_01.png")
imageB = cv2.imread("imgs/sedona_right_01.png")
imageA = imutils.resize(imageA, width=400)
imageB = imutils.resize(imageB, width=400)
# stitch the images together to create a panorama
stitcher = Stitcher()
(result, vis) = stitcher.stitch([imageA, imageB], showMatches=True)
# show the images
display_pair([imageA,imageB],["Image A","Image B"])
imshow(vis)
imshow(result)



Natural Geometry¶
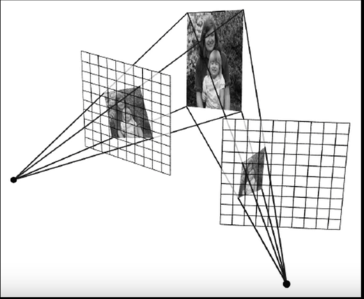
Image reprojection¶
The mosaic has a natural interpretation in 3D:
- The images are reprojected onto a common plane
- The mosaic is formed on this plane
Warning: This model only holds for angular views up to 180. Beyond that need to use sequence that "bends the rays" or map onto a different surface, say, a cylinder
Mosaics:¶
Obtain a wider angle view by combining multiple images all of which are taken from the same camera center
Homography¶
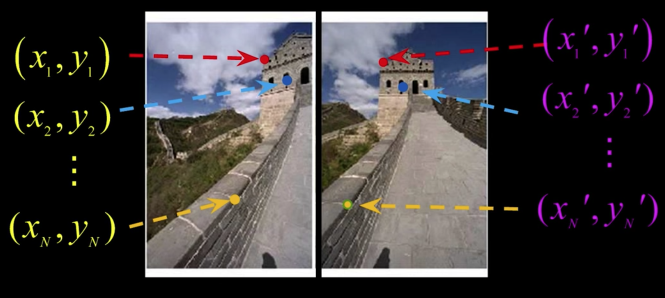
Assume we have detected corresponding points as in the image below, we have to solve for the equation:
$$\color{blue}{p' = Hp}$$ $$\color{blue}{\begin{bmatrix}wx'\\wy'\\w\end{bmatrix} = \begin{bmatrix}a&b&c\\d&e&f\\g&h&i\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}}$$
Solving for homographies - non-homogeneous¶
Since 8 unknowns, can set scale factor $\color{blue}{i=1$}
Set up a system of linear equations $\color{blue}{Ah = b} where vector of unknowns
$$\color{blue}{h=[a,b,c,d,e,f,g,h]^T}$$
Need at least 4 points for 8 eqs, but more the better...
Solve for h by $\color{blue}{min||Ah-b||^2}$ using least-squares
Solving for homographies - homogeneous¶
Just like we did for extrinsics, multiply through, and divide out by w
Gives tow homogeneous equations per point.
Solve using SVD just like before. This is the cool way


Quiz¶
We said that the transformation between two images taken from the same center of projection is a homography H. How many pairs of corresponding points do I need to compute H?
a) 6
b) 4
c) 3
d) 8
Homographies and 3D Planes¶
- Suppose the 3D points are on a plane:
$$\color{blue}{AX + bY = cZ + d = 0}$$
$$\color{blue}{\begin{bmatrix} u \\ v \\ 1 \end{bmatrix} \simeq \begin{bmatrix} m_{00} & m_{01} & m_{02} & m_{03} \\ m_{10} & m_{11} & m_{12} & m_{13} \\ m_{20} & m_{21} & m_{22} & m_{23} \\ \end{bmatrix}\begin{bmatrix}X \\Y \\\frac{aX + bY + d}{-c} \\1 \end{bmatrix}}$$
- So, can put the Z coefficients into the others
$$\color{blue}{\begin{bmatrix} u \\ v \\ 1 \end{bmatrix} \simeq \begin{bmatrix} m'_{00} & m'_{01} & 0 & m'_{03} \\ m'_{10} & m'_{11} & 0 & m'_{13} \\ m'_{20} & m'_{21} & 0 & m'_{23} \\ \end{bmatrix}\begin{bmatrix}X \\Y \\\frac{aX + bY + d}{-c} \\1 \end{bmatrix}}$$
- So, that is 3X3 (3 nonzeros columns), and that is why it is Homography
Image reprojection¶
- Mapping between planes is a homography
- Whether a plane in the world to the image or between image planes
## One image of a 3D plane can be aligned with another
## image of the same plane using Homography
# Read source image.
im_src = imread('imgs/book2.jpg')
# Four corners of the book in source image
pts_src = np.array([[141, 131], [480, 159], [493, 630],[64, 601]])
# Read destination image.
im_dst = imread('imgs/book1.jpg')
# Four corners of the book in destination image.
pts_dst = np.array([[318, 256],[534, 372],[316, 670],[73, 473]])
# Calculate Homography
h, status = cv2.findHomography(pts_src, pts_dst)
# Warp source image to destination based on homography
im_out = cv2.warpPerspective(im_src, h, (im_dst.shape[1],im_dst.shape[0]))
# Display images
display_pair([im_src,im_dst],["Source Image","Destination Image"])
imshow(im_out)


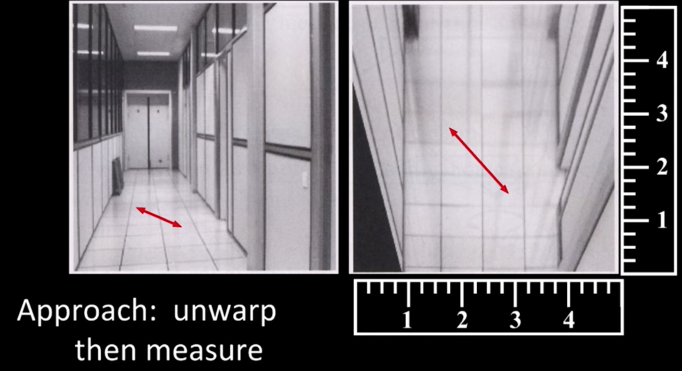
Image Rectification¶


If there is a planar rectangular grid in the scene, you can map it onto a rectangular grid in the image....
Forward Warping¶
Image warping¶
Given a coordinate trasform and a source image $\color{blue}{f(x,y)}$, how do we compute a transformed image $\color{blue}{g(x',y')}$?
Forward Warping¶
Send each pixel $\color{blue}{f(x,y)}$ to its corresponding location $\color{blue}{(x',y') T(x,y)}$ in the second image
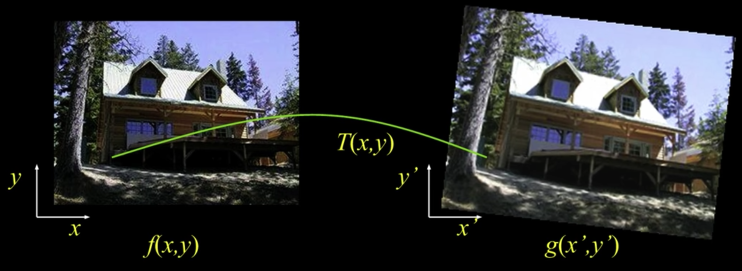
Inverse Warping¶
Given each pixel $\color{blue}{g(x',y')}$ from its corresponding location $\color{blue}{(x,y) = T^-1(x',y')}$ in the first image
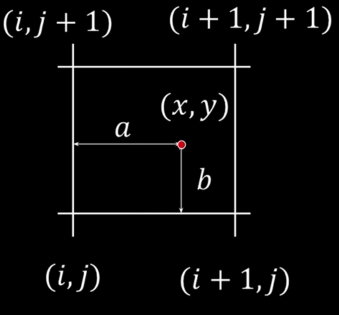
Bilinear interpolation¶
$$\color{blue}{f(x,y) = (1-a)(1-b)\,\,\,\,\,\, f[i,j]}$$ $$\color{blue}{+\,a(1-b)\,\,\, \,\,\, f[i+1,j]}$$ $$\color{blue}{+\,ab\,\,\,\,\,\, f[i+1,j+1]}$$ $$\color{blue}{+\,(1-a)b\,\,\,\,\,\, f[i,j+1]}$$
## https://scipython.com/book/chapter-8-scipy/examples/two-dimensional-interpolation-with-scipyinterpolategriddata/
import numpy as np
from scipy.interpolate import griddata
import matplotlib.pyplot as plt
x = np.linspace(-1,1,100)
y = np.linspace(-1,1,100)
X, Y = np.meshgrid(x,y)
def f(x, y):
s = np.hypot(x, y)
phi = np.arctan2(y, x)
tau = s + s*(1-s)/5 * np.sin(6*phi)
return 5*(1-tau) + tau
T = f(X, Y)
# Choose npts random point from the discrete domain of our model function
npts = 400
px, py = np.random.choice(x, npts), np.random.choice(y, npts)
fig, ax = plt.subplots(nrows=2, ncols=2)
# Plot the model function and the randomly selected sample points
ax[0,0].contourf(X, Y, T,cmap='rainbow')
ax[0,0].scatter(px, py, c='k', alpha=0.2, marker='.')
ax[0,0].set_title('Sample points on f(X,Y)')
fig.set_size_inches((15,15))
# Interpolate using three different methods and plot
for i, method in enumerate(('nearest', 'linear', 'cubic')):
Ti = griddata((px, py), f(px,py), (X, Y), method=method)
r, c = (i+1) // 2, (i+1) % 2
ax[r,c].contourf(X, Y, Ti,cmap='rainbow')
ax[r,c].set_title('method = {}'.format(method))
plt.show()

The projective plane¶
What is the geometric intuition of using homogeneous coordinates?
- A point in the image is a ray in projective space
- Each point (x,y) on the plane (at z=1) is represented by a ray (sx, sy, s)
All points on the ray are equivalent
$$\color{blue}{(x,y,1) \cong (sx,sy,s)}$$
Homogeneous coordinates¶
2D points:
$$\color{blue}{p = \begin{bmatrix}x\\y\end{bmatrix} ---> p' = \begin{bmatrix}x\\y\\1\end{bmatrix}--->p' = \begin{bmatrix}x'\\y'\\w'\end{bmatrix} --->p= \begin{bmatrix}\frac{x'}{w'}\\\frac{y'}{w'}\end{bmatrix}}$$
2D Lines: ax + by + c = 0
$$\color{blue}{\begin{bmatrix}a&b&c\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}=0}$$ $$\color{blue}{l = \begin{bmatrix}a&b&c\end{bmatrix} \Rightarrow \begin{bmatrix}n_x&n_y&-d\end{bmatrix}}$$
Point and Line Duality¶
What does a line in the image correspond to in projective space?
A line is a plane of rays through origin define by the normal $$\color{blue}{l = (a,b,c)}$$
All rays (x,y,z) satisfying: $$\color{blue}{ax + by + cz = 0}$$
$$\color{blue}{\begin{bmatrix}a&b&c\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}=0}$$
A line is also represented as a homogeneous vector
- A line l is a homogeneous 3-vector
- It is $\perp$ to every point (ray) p on the line $\color{blue}{l^Tp=0}$
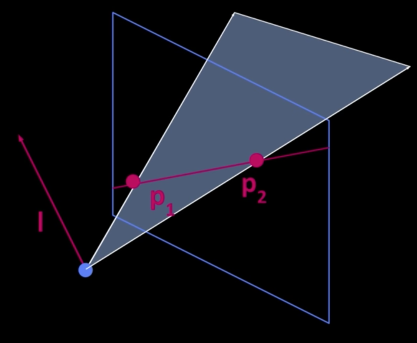
What is the line l spanned by rais $p_1$ and $p_2$?</font>
since $p_1$ is $\perp$ to $p_1$ and $p_2$
$\color{blue}{\Rightarrow}$ $\color{blue}{l = p_1 x p_2}$
What is the interection of two lines $\color{blue}{l_1}$ and $\color{blue}{l_2}$?</font>
since $p$ is $\color{blue}{\perp}$ to $l_1$ and $l_2$ $\color{blue}{\implies}$ $p = l_1xl_2$
Points and lines are dual in projective space
- Given any formula, can switch the meanings of points and lines to get another formula
Homogeneous coordinates¶
Line joining two points:
$$\color{blue}{p_1 = \begin{bmatrix}x_1&y_1&1\end{bmatrix}}$$ $$\color{blue}{p_2 = \begin{bmatrix}x_2&y_2&1\end{bmatrix}}$$ $$\color{blue}{l = p_1xp_2}$$

Intersection between two lines:
$$\color{blue}{a_1x - b_1y + c_1 = 0}$$
$$\color{blue}{a_2x - b_2y + c_2 = 0}$$
$$\color{blue}{l_1 = \begin{bmatrix}a_1&b_1&c_1\end{bmatrix}}$$ $$\color{blue}{l_2 = \begin{bmatrix}a_2&b_2&c_2\end{bmatrix}}$$ $$\color{blue}{p_{12} = l_1xl_2}$$
Quiz¶
How can I tell whether a point p is on a line L in an image?
a) Check if p X L is zero
b) Check if $p \cdot L$ is zero
c) Check if the magnitude of the sum is greater than 1
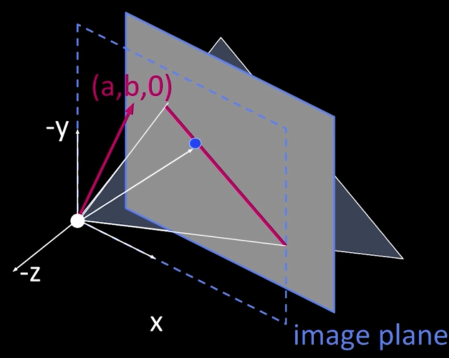
Ideal points and lines¶
Ideal point ("point at infinity")
$\color{blue}{p \cong (x,y,0)}$ parallel to image plane, has infinit image coordinates
Corresponds to a line in the image (finite coordinates)
- goes through image origin (principle point)
3D projective geometry¶
- These concepts generalize naturally to 3D
- Recall the equation of a plane: $$\color{blue}{aX + bY + cZ + d = 0}$$
- Homogeneous coordinates
- Projective 3D points have four coords: $\color{blue}{p = (wX,wY,wZ,w)}$
- Duality
- A plane N is also represented by a 4-vector
$\color{blue}{N = (a,b,c,d)}$ - Points and planes are dual in 3D: $\color{blue}{N^Tp = 0}$
- A plane N is also represented by a 4-vector
- Projective transformations:
- Represented by 4X4 matrices T: $\color{blue}{P' = TP}$
Stereo correspondence¶
Motivating the problem: stereo¶
- Given two views of a scene (two cameras not necessarily having parallel optical axes) what is the relationship between the location of a scene point in one image and its location in the other?
Stereo Correspondence¶
Find pairs of points that correspond to same scene point
Epoipolar Constraint reduces correspondence propblem to 1D search along conjugate epipolar lines
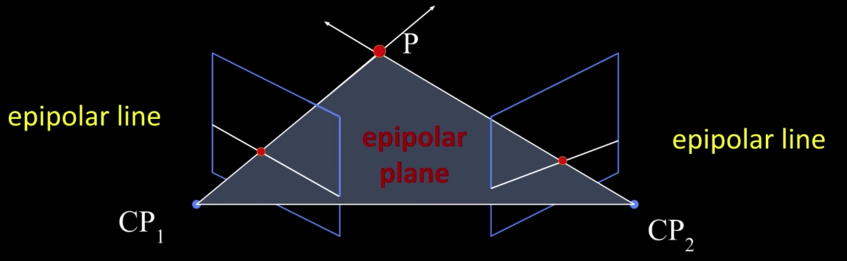
Baseline: line joining the camera centers
Epipolar plane: plane containing baseline and world point
Epipole: point of intersection of baseline with image plane
More above
Aside 1¶
Reminder of cross product¶
Vector cross product takes two vectors and returns a third vector that's perpendicular to both inputs
$$\color{blue}{\overrightarrow{a}\times \overrightarrow{b} = \overrightarrow{c}}$$
Here c is perpendicular to both a and b, i.e. the dot product = 0
$$\color{blue}{\overrightarrow{a}\cdot \overrightarrow{c} = 0}$$ $$\color{blue}{\overrightarrow{b}\cdot \overrightarrow{c} = 0}$$
Also AxA = 0 for all A
From Geometry to Algebra¶
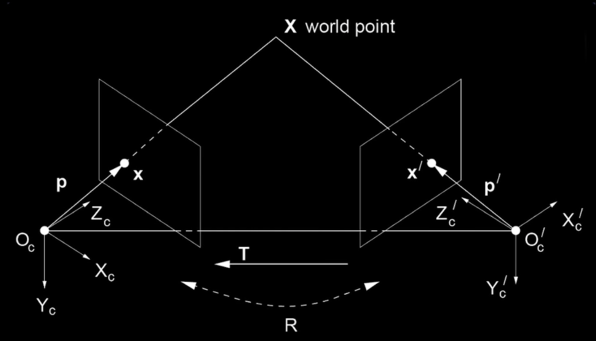
Assuming T and R are known $$\color{blue}{X' = RX+T}$$ $$\color{blue}{T\times X' = T\times RX+T\times T}$$
$\color{blue}{T \times X'}$: Normal to the plane
$$\color{blue}{T\times X' = T\times RX}$$
$$\color{blue}{\implies X' \cdot (T\times X') = X' \cdot(T\times RX)}$$
$$0 = X' \cdot(T\times RX)$$
Aside 2: Matrix form of cross product¶
$$\color{blue}{\overrightarrow{a}\times \overrightarrow{b} = \begin{bmatrix}0&-a_3&a_2\\a_3&0&-a_1\\-a_2&a_1&0\end{bmatrix}\begin{bmatrix}b_1\\b_2\\b_3\end{bmatrix} = \overrightarrow{c}}$$
We will define a new operator:
$$\color{blue}{[a_x] = \begin{bmatrix}0&-a_3&a_2\\a_3&0&-a_1\\-a_2&a_1&0\end{bmatrix} }$$
So the notation: $$\color{blue}{\overrightarrow{a}\times \overrightarrow{b} = [\overrightarrow{a}_x]\overrightarrow{b}}$$
Essential matrix¶
$$\color{blue}{0 = X' \cdot(T\times RX)}$$ $$\color{blue}{0 = X' \cdot([T_x]\times RX)}$$
$\color{blue}{E}$ is called the "essential matrix"
More on the lecture
Quiz¶
That's fine for some convereged cameras. But what if the image planes are parallel. What happens?
a) That is a degenereate case.
b) That's fine. R is just the identity and the math works
c) I have no idea
Essential Matrix Example¶
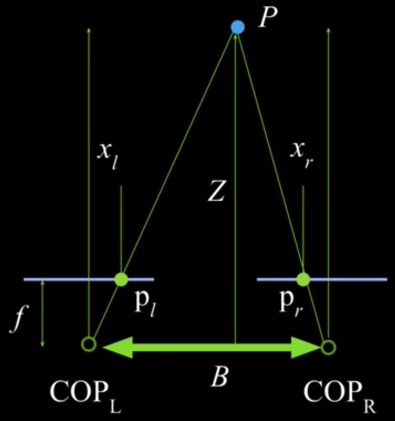
$$\color{blue}{R = I}$$ $$\color{blue}{T = [-B,0,0]^T}$$ $$\color{blue}{E = [T_x]R = \begin{bmatrix}0&0&0\\0&0&B\\0&-B&0\end{bmatrix}}$$
$$\color{blue}{p'^TEp = 0}$$
$$\color{blue}{p = [X,Y,Z] = [\frac{Zx}{f},\frac{Zy}{f},Z]}$$
$$\color{blue}{p' = [X,Y,Z] = [\frac{Zx'}{f},\frac{Zy'}{f},Z]}$$
$$\color{blue}{\begin{bmatrix}x'&y'&f\end{bmatrix}\begin{bmatrix}0&0&0\\0&0&B\\0&-B&0\end{bmatrix}\begin{bmatrix}x\\y\\f\end{bmatrix}=0}$$
$$\color{blue}{\begin{bmatrix}x'&y'&f\end{bmatrix}\begin{bmatrix}0\\Bf\\-By\end{bmatrix}=0}$$
$$\color{blue}{Bfy' = Bfy \implies y' = y}$$
Given a known point $\color{blue}{(x,y)}$ in the original image, this is a line in the $\color{blue}{(x',y')}$ image
import matplotlib.pyplot as plt
from mpl_toolkits import mplot3d
import numpy as np
def plot_square(TP,ax):
p1 = TP[0].flatten(); p2 = TP[1].flatten(); p3 = TP[2].flatten(); p4 = TP[3].flatten();
ax.plot([p1[0],p2[0]],[p1[1],p2[1]],zs=[p1[2],p2[2]],c="blue")
ax.plot([p2[0],p3[0]],[p2[1],p3[1]],zs=[p2[2],p3[2]],c="blue")
ax.plot([p3[0],p4[0]],[p3[1],p4[1]],zs=[p3[2],p4[2]],c="blue")
ax.plot([p4[0],p1[0]],[p4[1],p1[1]],zs=[p4[2],p1[2]],c="blue")
def create_image_plane(camera,focalLength,fv):
hfv = fv/2.0
P1 = np.array([camera[0]-hfv,camera[1]+hfv,camera[2]+focalLength,1])
P2 = np.array([camera[0]+hfv,camera[1]+hfv,camera[2]+focalLength,1])
P3 = np.array([camera[0]+hfv,camera[1]-hfv,camera[2]+focalLength,1])
P4 = np.array([camera[0]-hfv,camera[1]-hfv,camera[2]+focalLength,1])
return np.array([P2,P3,P4,P1])
def plane_ray_intersection(plane,p1,p2):
from sympy import Point3D, Plane, Line, Polygon
point1 = Point3D(plane[0][0], plane[0][1], plane[0][2])
point2 = Point3D(plane[1][0], plane[1][1], plane[1][2])
point3 = Point3D(plane[2][0], plane[2][1], plane[2][2])
point4 = Point3D(plane[3][0], plane[3][1], plane[3][2])
planeL = Plane(point1,point2, point3)
planeR = Plane(point2,point3, point4)
line = Line(Point3D(p1[0],p1[1],p1[2]),Point3D(p2[0],p2[1],p2[2]))
inter1 = planeL.intersection(line)
inter2 = planeR.intersection(line)
if len(inter1)>0:
return inter1[0]
if len(inter2):
return inter2[0]
return None
fig = plt.figure(figsize=(10,10))
ax = plt.axes(projection='3d')
## Camera 1
fv = 3
focalLength = 3
camera1 = (0.5,0.5,0.5,1)
iplane1 = create_image_plane(camera1,focalLength,fv)
ax.scatter(camera1[0],camera1[1],camera1[2])
plot_square(iplane1,ax)
## Camera 2
vx = -5;vy = 0;vz = 0
T = np.array([[1,0,0,vx],[0,1,0,vy],[0,0,1,vz]])
camera2 = np.matmul(camera1,T.T)
ax.scatter(camera2[0],camera2[1],camera2[2])
iplane2 = create_image_plane(camera2,focalLength,fv)
plot_square(iplane2,ax)
P = np.array([-2,0.5,10])
ax.scatter(P[0],P[1],P[2])
ax.plot([P[0],camera1[0]],[P[1],camera1[1]],zs=[P[2],camera1[2]],c="red")
ax.plot([P[0],camera2[0]],[P[1],camera2[1]],zs=[P[2],camera2[2]],c="yellow")
ip1 = plane_ray_intersection(iplane1,camera1,P)
ip2 = plane_ray_intersection(iplane2,camera2,P)
print(ip1)
print(ip2)
ax.scatter(ip1[0], ip1[1], ip1[2])
ax.scatter(ip2[0], ip2[1], ip2[2])

Anyone is welcomed to implement the convereged cameras ones
Weak Calibration¶
Main idea:
- Estimate epipolar geometry from a (redundant) set of point correspondences between two uncalibrated cameras
$$\color{blue}{\begin{bmatrix}wx_{im}\\wy_{im}\\w\end{bmatrix} = K_{int}\Phi_{ext} \begin{bmatrix}X_w\\Y_{w}\\Z_w\\1\end{bmatrix}}$$
$$\color{blue}{\Phi_{ext} = \begin{bmatrix} r_{11}&r_{12}&r_{13}&-R_1\ ^tT\\ r_{21}&r_{22}&r_{23}&-R_2\ ^tT\\ r_{31}&r_{32}&r_{33}&-R_3\ ^tT \end{bmatrix}}$$
The rs are the rotation matrix and the RTs are the transformed translation matrix
$$\color{blue}{ K_{int} = \begin{bmatrix} \frac{-f}{s_x} & 0 & o_x\\ 0 & \frac{-f}{s_y} & o_y\\ 0&0&1 \end{bmatrix}}$$
Note: invertible, scale x and y, assumes no skew
$$\color{blue}{p_im = K_{int}\Phi_{ext}P_w}$$
But
$$\color{blue}{\Phi_{ext}P_w=p_c}$$
$\color{blue}{p_c}$: is the 3D point but in the camera frame
$$\color{blue}{p_{im} = K_{int}p_c}$$
Uncalibrated Case¶
For a given camera: $\color{blue}{\,\,\,p_{im} = K_{int}P_c}$
And since invertible: $\color{blue}{\,\,\,p_{c} = K^{-1}_{int}P_{im}}$
Here $\color{blue}{p_{c}}$ is in terms of the ray. In other words, we only can know the ray that point to the $\color{blue}{P_{im}}$ not a particular point
So, for two cameras (left and right):
$$\color{blue}{p_{c,left} = K^{-1}_{int,left}P_{im,left}}$$
$$\color{blue}{p_{c,right} = K^{-1}_{int,right}P_{im,right}}$$
From before, the essential matrix E:
$$\color{blue}{p_{c,right}\ ^TEp_{c,left}=0}$$
We know it is uncalibrated, but we know their exists an essential matrix. So, we can rewrite
$$\color{blue}{(K^{-1}_{int,right}p_{im,right})^T\,E(K^{-1}_{int,left}p_{im,left}) = 0}$$
Matrix Multiplication¶
We can regroup:
$$\color{blue}{p^T_{im,right}((K^{-1}_{int,right})^T\,EK^{-1}_{int,left})p_{im,left} = 0}$$
$\color{blue}{(K^{-1}_{int,right})^T\,EK^{-1}_{int,left}}$ is the Fundamental matrix: F
$$\color{blue}{p^T_{im,right}Fp_{im,left} = 0}$$
$$\color{blue}{p^TFp'=0}$$
Properties of the Fundamental Matrix¶
$p^T$Fp'=0
$p^T$ l = 0
l = Fp' is the epipolar line in the p image associated with p'
l' = $F^T$p is the epipolar line in the p image associated with p
description in the lecture
Properties of the Fundamental Matrix (2)¶
Suppose p' was on the epipolar line, in the prime image for every point p in the original image. This could happen if
$$\color{blue}{Fp' = 0}$$
Epipoles found by solving one of the previous two equations
Properties of the Fundamental Matrix (3)¶
F is singular (mapping from homogeneous 2-D point to 1-D family so rank 2 - more later)
Fundamental matrix¶
- Relates pixel coordinates in the two views
More general form than essential matrix
- We remove the need to know intrinsic parameters
If we estimate fundamental matrix from correspondences in pixel coordinates, can reconstruct epipolar geometry without intrinsic or extrinsic parameters

Finding the Fundamental Matrix¶
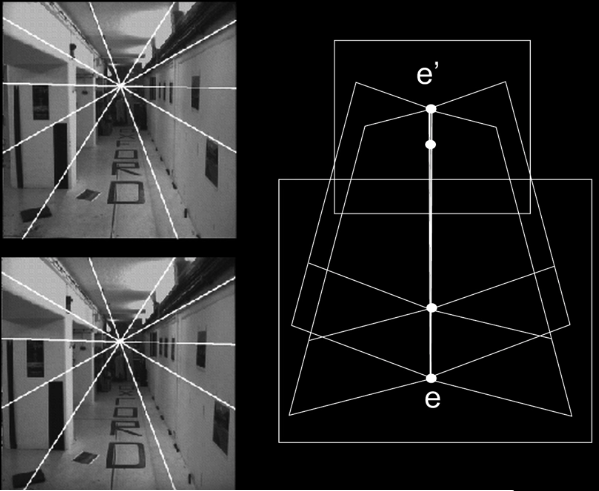
Computing F from correspondences¶
Each point correspondence generates one constraint on F
$$\color{blue}{P^T_{im,right} F p_{im,left} = 0}$$
$$\color{blue}{\begin{bmatrix}u'&v'&1\end{bmatrix}\begin{bmatrix} f_{11}&f_{12}&f_{13}\\ f_{21}&f_{22}&f_{23}\\ f_{31}&f_{32}&f_{33} \end{bmatrix}\begin{bmatrix}u&v&1\end{bmatrix} = 0}$$
$$\color{blue}{ \begin{bmatrix}u'_1u_1&u'_1v_1&u'_1&v'_1u_1&v'_1v_1 &v'_1&u_1&v_1&1\end{bmatrix} \begin{bmatrix}f_{11}\\f_{12}\\f_{13}\\f_{21}\\f_{22}\\f_{23}\\f_{31}\\f_{32}\\f_{33}\end{bmatrix} }$$
Collect N of these
$$\color{blue}{ \begin{bmatrix} u'_1u_1&u'_1v_1&u'_1&v'_1u_1&v'_1v_1 &v'_1&u_1&v_1&1\\ .&.&.&.&.&.&.&.&\\ .&.&.&.&.&.&.&.&\\ .&.&.&.&.&.&.&.&\\ u'_nu_n&u'_nv_n&u'_n&v'_nu_n&v'_nv_n &v'_n&u_n&v_n&1 \end{bmatrix} \begin{bmatrix}f_{11}\\f_{12}\\f_{13}\\f_{21}\\f_{22}\\f_{23}\\f_{31}\\f_{32}\\f_{33}\end{bmatrix} }$$
The infamous Eight Point Algorithm¶
From Wikipedia:
The eight-point algorithm is an algorithm used in computer vision to estimate the essential matrix or the fundamental matrix related to a stereo camera pair from a set of corresponding image points. It was introduced by Christopher Longuet-Higgins in 1981 for the case of the essential matrix. In theory, this algorithm can be used also for the fundamental matrix, but in practice the normalized eight-point algorithm, described by Richard Hartley in 1997, is better suited for this case.
The Algorithm from PSU:
- Construct the m x 9 matrix A
- Find the SVD of A: A = UDVT
- The entries of F are the components of the column of V corresponding to the least s.v.
If we use the eight point algorithm to solve for the fundamental matrix and thus find the equations for the epipolar lines for the previous image, we will get something as messy as the one below

Rank of F¶
- Assume w know the homography $\color{blue}{H_\pi}$ that maps from Left to RIght (Full 3X3) $$\color{blue}{p' = H_\pi P}$$
- Let line l' be the epipolar line corresponding to p goes through epipole e'
$$\color{blue}{l' = e'\times p' }$$ $$= e'\times H_\pi p $$ $$\color{blue}{= [e']_\times H_\pi p}$$
But l' is the epipolar line for p
$\color{blue}{l' = Fp}$
So.....
Fix the Linear Solution¶
- Use SVD or other method to do linear computation for F
- Decompose F using SVD (not the same SVD) $$\color{blue}{F=UDV^T}$$
- Set the last singular value to zero:
$$\color{blue}{D= \begin{bmatrix}r&0&0\\0&s&0\\0&0&t\end{bmatrix}\implies \hat{D} = \begin{bmatrix}r&0&0\\0&s&0\\0&0&0\end{bmatrix} }$$
- Estimate new F from the new $\hat{D}$ $$\color{blue}{\hat{F} = U\hat{D}V^T}$$

## Code stolen from previous sections above
%matplotlib inline
import cv2
import numpy as np
from matplotlib import pyplot as plt
img1 = cv2.imread('imgs/left.jpg',0) #queryimage # left image
img2 = cv2.imread('imgs/right.jpg',0) #trainimage # right image
sift = cv2.xfeatures2d.SIFT_create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
# FLANN parameters
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
matches = flann.knnMatch(des1,des2,k=2)
good = []
pts1 = []
pts2 = []
# ratio test as per Lowe's paper
for i,(m,n) in enumerate(matches):
if m.distance < 0.8*n.distance:
good.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
pts1 = np.int32(pts1)
pts2 = np.int32(pts2)
F, mask = cv2.findFundamentalMat(pts1,pts2,cv2.FM_LMEDS)
# We select only inlier points
pts1 = pts1[mask.ravel()==1]
pts2 = pts2[mask.ravel()==1]
def drawlines(img1,img2,lines,pts1,pts2):
''' img1 - image on which we draw the epilines for the points in img2
lines - corresponding epilines '''
r,c = img1.shape
img1 = cv2.cvtColor(img1,cv2.COLOR_GRAY2BGR)
img2 = cv2.cvtColor(img2,cv2.COLOR_GRAY2BGR)
for r,pt1,pt2 in zip(lines,pts1,pts2):
color = tuple(np.random.randint(0,255,3).tolist())
x0,y0 = map(int, [0, -r[2]/r[1] ])
x1,y1 = map(int, [c, -(r[2]+r[0]*c)/r[1] ])
img1 = cv2.line(img1, (x0,y0), (x1,y1), color,1)
img1 = cv2.circle(img1,tuple(pt1),3,color,-1)
img2 = cv2.circle(img2,tuple(pt2),3,color,-1)
return img1,img2
# Find epilines corresponding to points in right image (second image) and
# drawing its lines on left image
lines1 = cv2.computeCorrespondEpilines(pts2.reshape(-1,1,2), 2,F)
lines1 = lines1.reshape(-1,3)
img5,img6 = drawlines(img1,img2,lines1,pts1,pts2)
# Find epilines corresponding to points in left image (first image) and
# drawing its lines on right image
lines2 = cv2.computeCorrespondEpilines(pts1.reshape(-1,1,2), 1,F)
lines2 = lines2.reshape(-1,3)
img3,img4 = drawlines(img2,img1,lines2,pts2,pts1)
fig = plt.gcf()
fig.set_size_inches((20,15))
plt.subplot(121),plt.imshow(img5)
plt.subplot(122),plt.imshow(img3)
plt.show()

Stero Image Rectification¶
- Reproject image planes onto a common plane parallel to the line between optical centers - each a homography
- Pixel motion is horizontal after this transformation
- C. Loop and Z. Zhang. Computing Rectifying Homographies for Stereo Vision. IEEE Conf. Computer Vision and Pattern Recognition, 1999
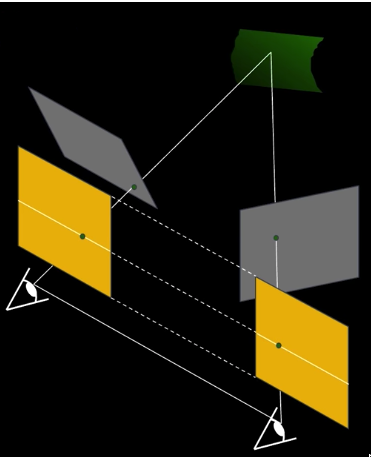
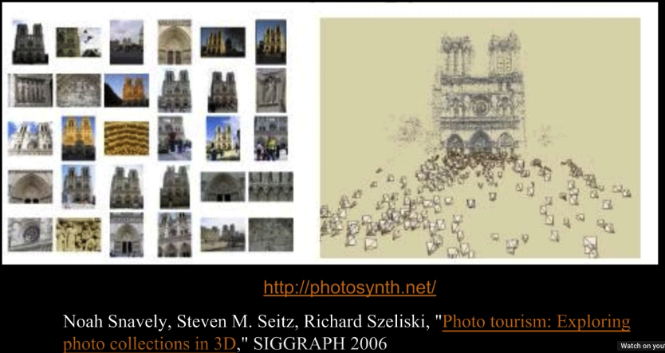

"""
Anyone is welcomed to put code here for the previous
concepts. I am too busy reading "The bleak house" and
"The way of kings" :)
"""
Summary¶
For 2-views, there is a geometric relationship that defines the relation between rays in one view to rays in the other - epipolar geometry
These relationships can be captured algebraically as well:
- Calibrated - Essential matrix
- Uncalibrated - Fundamental matrix
- This relation can be estimated from point correspondences